请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843 工具/软件:
您好:
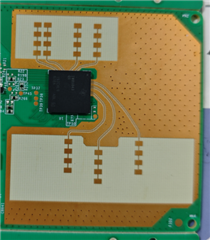
我正在使用 IWR6843、基于 radar_toolbox_3_10_00_05 的机器人示例程为 ROS 系统开发毫米波雷达。 我设计了一个新的稀疏阵列天线。 如下图所示、当 TX 天线和 RX 天线处于同一水平平面时、 Capon 算法计算出的仰角和方位角是正确的。
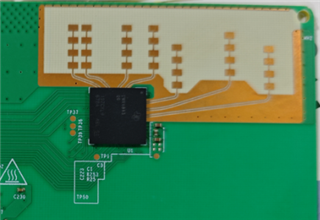
但是、当 TX 和 RX 天线不处于同一水平平面时(如下图所示) 、我将 cfg 文件中的 antPhaseRot 参数设置为–1 –1 –1 –1 –1 –1 –1 –1 –1 –1 –1、Capon 算法计算的仰角分成多个值。 异常值似乎接近 fovCfg 参数中设置的仰角 FOV 值。 您能否帮助分析可能的原因? 谢谢你