请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LDC5072-Q1 工具/软件:
我对 LDC5072 工具的使用有几个问题:
-
在“Sensor Type“部分下有多个选项、例如角同轴型 I、角离轴等。 有人能帮助我了解这些配置的含义、以及如何选择正确的配置吗?
-
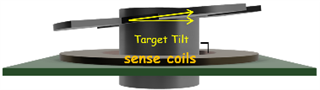
我的传感器放置在的地方 轴端 。 我想知道这种定位是否会影响性能、或者是否需要任何特殊注意事项。
-
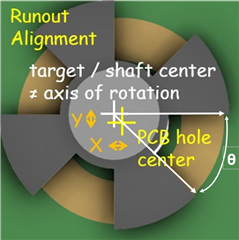
我目前看到的是 角度误差约为 4 度 但理想情况下、我希望此误差尽可能低。 我可以采取哪些步骤来减少角度误差?
-
我正在使用 外部箔片 方法进行比较。 这是合适的、还是我应该考虑任何替代方案?
-
如何操作 最大加速度 和 最大速度 数值会影响工具的性能或输出? 是否有建议的限值?
-
什么是 标准值 应该为输入 制造容差 ?
-
相关 优化器目标 、我没有修改任何设置。 是否可以将它们保留为默认值?
-
最后、对于 LDC5072 特定设置 、我是否需要更改任何默认参数、或者现有的值是否适合一般用途?
非常感谢您的指导。