请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843BOOST 主题中讨论的其他器件:AWR2944、 AWR1843
工具/软件:
尊敬的先生:
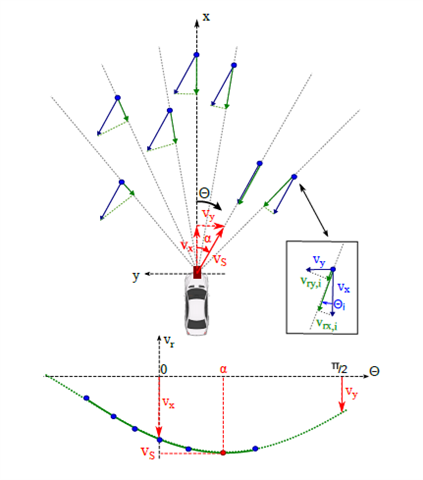
我能否区分 ransacFitPolynomial 函数中的 yFit 以获得 α 角(=车辆旋转角度)?
* yFit = P[0]+ P[1]* data[idx].vector.方位 角+ P[2]* data[idx].vector.方位 角* data[idx].vector.方位 角;
谢谢、
Shin