

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843AOP工具/软件:
您好:
作为评估过程的一部分、我将比较的性能 IWR6843AOP 雷达 分为两种配置:
-
实际为 A 独立单元 (直接连接到 PC 并通过 TI GUI 进行可视化)
-
提供的示例工程 集成 D3 封装 它们安装在我们的无人机上并通过接口连接 CAN 总线。
测试设置:
在隔离的房间(消声室)中、我测量了 18dBsm 角反射器 并观察到:
-
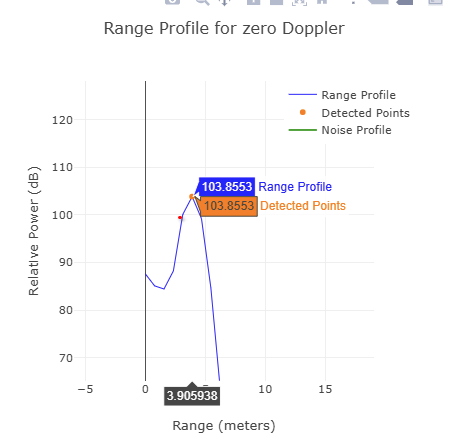
在中 TI GUI (独立设置): 相对功率=~104dB
-
在中 D3 封装、通过 CAN 总线(侧‑信息 TLV) :
-
snr_db= 280 -
noise_db= 642
-
我的问题:
问题 1:
假设snr_db和noise_db位于中 0.1dB 单位 、总信号功率为:
SNR + Noise = 28.0dB + 64.2dB = 92.2dB
是这样吗?
问题 2:
到底是什么 “相对功率 (dB)“ 如所示 TI GUI ?
如何从原始 TLV 数据或侧信息字段中获取它?
问题 3:
之间的关系是什么 “相对功率“ 在 GUI 和中 侧边‑信息 (SNR_db、noise_db) ?
怎么会这样呢 进行比较 将独立雷达输出到 基于 CAN 的侧‑信息 价值是什么?
问题 4:
从 A 获得的总信号功率为~92dB 20 dBsm 角反射器 似乎很高。
有什么已知的吗 比例因子、偏移或增益 已添加到 TI 信号链或可视化工具中的信号中?
我的 总体目标 按照所示设置 测量 RCS 目标并了解它们 可检测性 IWR6843AOP。
提前感谢您的支持。

