

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843主题中讨论的其他器件:IWRL6432、、
工具/软件:
您好、
我们本来计划使用 MRR 演示、但后来由于下面中所述的问题、我们切换回 OOB(开箱即用)演示 Q3 。
我们有关于 MRR/OOB 的一些问题:
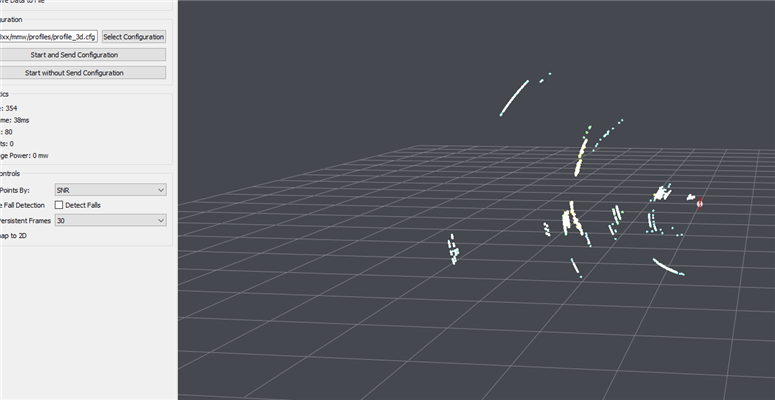
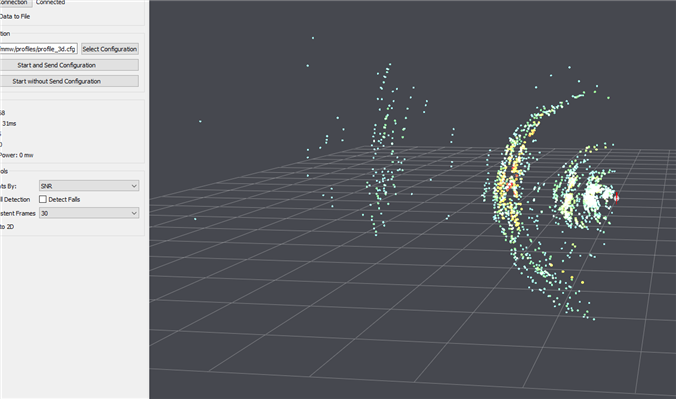
尽管 OOB 演示输出的点云采用 x、y、z 坐标、但点云输出看起来像图中所示的球形。
MRR 演示中也观察到了该球形点云。
之前、我们使用的是 IWRL6432 的点云输出与这种球形不同、而更像是笛卡尔坐标系。
1) 你能解释这个表格吗? 是关于 AWR1843 还是 OOB 演示?
*我们使用具有 profile_3d.cfg 和 profile_2d.cfg 配置的 AWR1843BOOST。
2) 是否可以得到正确的 带 OOB 演示的物体坐标?
这是因为、对于所有仰角、雷达与墙壁之间的距离都不同。
(例如,0°d=3.0m 时、30°d=3.2m 时)
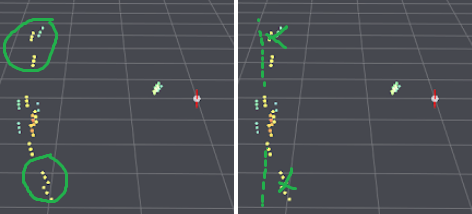
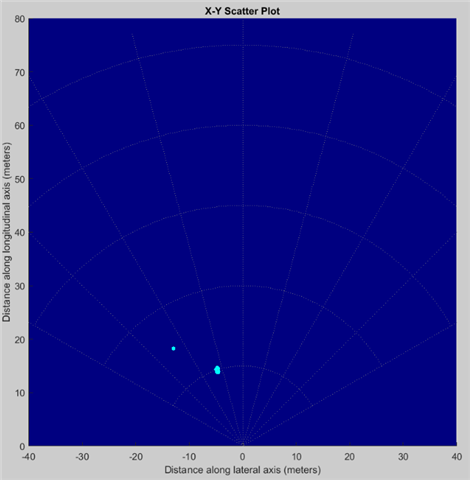
此外、我们正在测试 MRR 演示并在 USRR 子帧点云输出中实现问题、如下所述。
简而言之、当目标距离雷达更远(直线)时、其方位角会向-y 轴增加。
3) 我们在论坛中找不到任何解决方案,假设 MRR 演示中没有此错误的解决方案?
AWR1843BOOST:MRR 波束控制实验代码方位平面上的错误检测角度
板:AWR1843BOOST
毫米波 SDK: mmwave_sdk_03_06_02_00-LTS
Radar Toolbox: radar_toolbox_3_20_00_04
CCS:Code Composer Studio 12.8.1
此致、
