

工具/软件:
尊敬的 TI 支持团队:
我正在开发 室内乘员监控器件 使用了 IWRL6432AOP 雷达传感器。
设置详细信息:
-
已刷写固件:
MMWAVE_L_SDK_05_05_03_00\examples\mmw_demo\motion_and_presence_detection\prebuilt_binaries\xwrL64xx-aop\motion_and_presence_detection_demo_aop.release.appimage -
配置文件:
根据PresenceDetect.cfgMMWAVE_L_SDK_05_05_03_00\examples\mmw_demo\motion_and_presence_detection\profiles\xwrL64xx-aop\
(根据房间尺寸和传感器位置进行修改)。
测试环境:
-
房间大小:
宽度= 330 厘米、长度= 360 厘米、高度= 215 厘米-
rangeSelCfg 0.1 4.8mpdBoundaryBox 1 –1.8 0 1.65 0 2.15mpdBoundaryBox 2 –3.6 –1.8 0 1.65 0 2.15mpdBoundaryBox 3 –1.8 0 1.65 3.3 0 2.15mpdBoundaryBox 4 –3.6 –1.8 1.65 3.3 0 2.15
-
-
传感器放置:
安装在高度为~206cm 的壁角中、向下倾斜~10 度、将角放置 45 度。-
sensorPosition 0 2.06 –45 10.
-
- 完整配置文件:
% *************************************************************** % PresenceDetect: Chirp configuration and Processing chain are % optimized to detect any kind of motion, including fine movements % (even small movements that are present while sitting still, % such as, movement caused by typing, breathing, etc.). However, % there is no velocity measurement reported in this case. % It is typically useful for applications such as identifying % presence or absence of occupants in an indoor setting. % Localization (Angle estimation) of the object is possible. % *************************************************************** sensorStop 0 channelCfg 7 3 0 chirpComnCfg 20 0 0 128 1 30 2 chirpTimingCfg 6 28 0 90 59.75 frameCfg 8 0 403 1 250 0 guiMonitor 2 2 0 0 0 1 1 0 0 0 0 sigProcChainCfg 64 8 2 0 4 4 0 .5 cfarCfg 2 4 3 2 0 12.0 0 0.8 0 1 1 1 aoaFovCfg -60 60 -40 40 rangeSelCfg 0.1 4.8 clutterRemoval 1 antGeometryCfg 1 1 1 0 0 1 1 3 1 2 0 3 2.5 2.5 compRangeBiasAndRxChanPhase 0.0 1.00000 0.00000 1.00000 0.00000 1.00000 0.00000 1.00000 0.00000 1.00000 0.00000 1.00000 0.00000 adcDataSource 0 adc_data_0001_CtestAdc6Ant.bin adcLogging 0 lowPowerCfg 1 factoryCalibCfg 1 0 38 3 0x1ff000 mpdBoundaryBox 1 -1.8 0 0 1.65 0 2.15 mpdBoundaryBox 2 -3.6 -1.8 0 1.65 0 2.15 mpdBoundaryBox 3 -1.8 0 1.65 3.3 0 2.15 mpdBoundaryBox 4 -3.6 -1.8 1.65 3.3 0 2.15 sensorPosition 0 0 2.06 -45 10 minorStateCfg 5 4 40 8 4 30 8 8 clusterCfg 1 0.5 2 baudRate 1250000 sensorStart 0 0 0 0
- 雷达工具的默认 UI
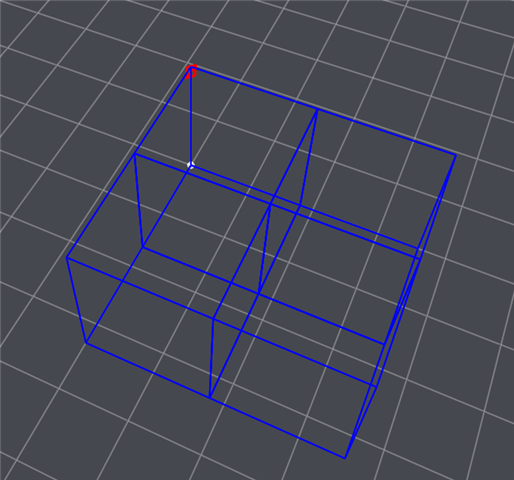
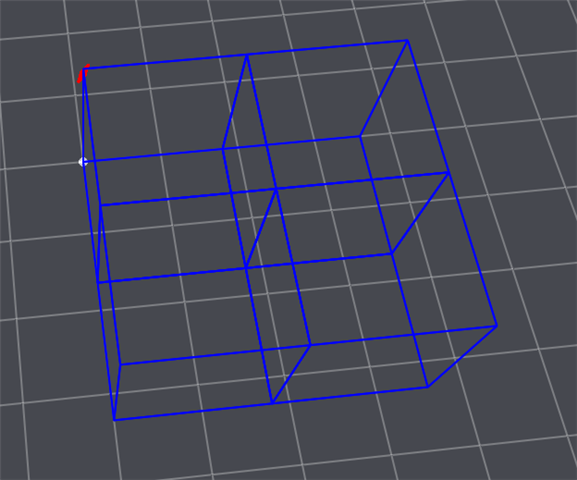
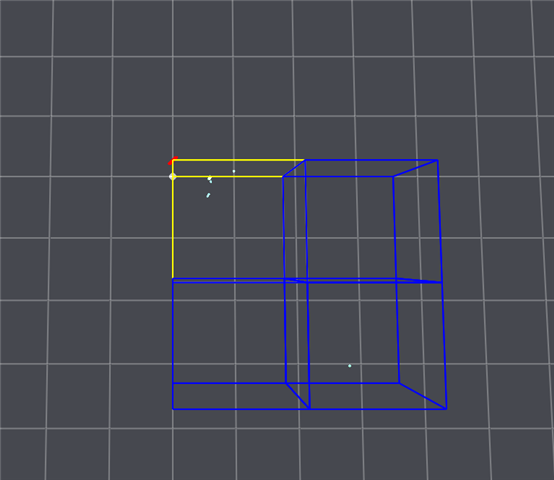
测试区域 图像:坐在最远角(区域 4)的人

传感器放置图像:

问题:
-
是的 无法在全部 4 个区域实现可靠的占位检测 。
-
具体地说、 区域 4(距离传感器最远的对角线) 从不显示正确的占位检测。
-
在电流测试环境(~3.3m× 3.6m 的房间)中、性能已经受到限制、而在中 实际部署目标(~10m× 10m 区域) 、我担心效率降低。
请求:
-
您能否请查看我的配置并为实现正确的参数调整提出建议 在所有 4 个区域进行高效的占位检测 ?
-
请就具体情况提供指导 需要进行更改以扩展更大房间(≈10m× 10m)的覆盖范围 功能。
-
不限 传感器放置最佳实践 (墙壁安装与天花板安装,角度等)也会有所帮助。
感谢您的支持。
Bhavya
