

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWRL6432工具/软件:
尊敬的专家:
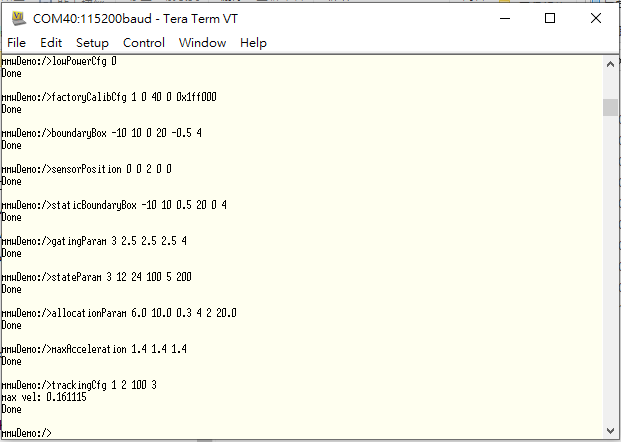
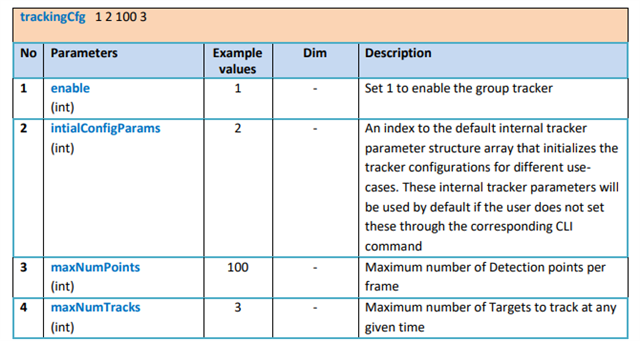
在新的升级 SDK 5.5.4.2 中、客户报告跟踪配置很奇怪。 它们使用烧录的 IWRL6432 EVM、包含 SDK v5.5.4.2 运动和存在检测(具有附加配置)。 使用 cli_write 函数输出观察到的结果、打开雷达并查看跟踪配置中最大速度和分辨率的输入。
e2e.ti.com/.../Test_5F00_Config.txt
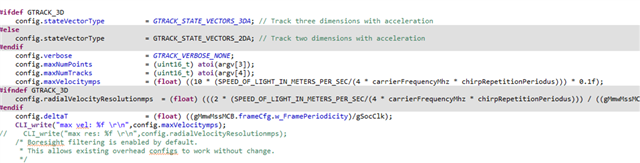
在 SDK 5.5.4.2 中、最大速度是自行计算的、而不是通过跟踪配置输入。
“config.maxVelocitymps =(float)((10 *(SPEED_OF_LIGHT_IN_METERS_PER_SEC/(4 * crierFrequencyMhz * chirpRepetitionPeriodus))* 0.1f);“
非常快

雷达输出 config.maxVelocitymps 的值、它是 0.16115m/s、不是最大速度的正确值。 该配置的最大速度约为 11m/s
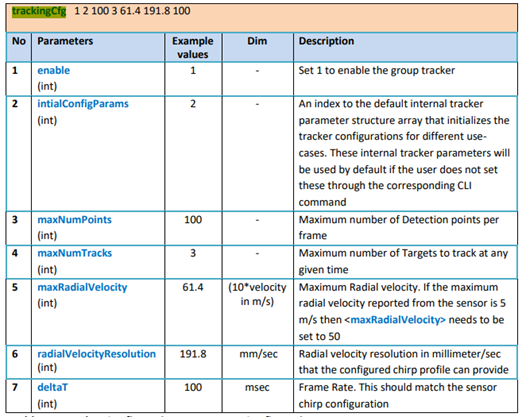
请注意、在之前版本 (v5.5.3.0) 中、雷达不会在跟踪配置本身计算速度的最大值和分辨率、而是使用跟踪配置输入速度信息。 下面是之前的 SDK v5.5.3.0 中跟踪配置示例的参考。
客户想知道我们更改计算的原因是什么? 将会受到哪些影响?
此致
Andre

