

Other Parts Discussed in Thread: DRV5056-Q1, DRV5057-Q1, DRV5057, DRV5055-Q1
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: DRV5057-Q1
主题中讨论的其他器件: DRV5057、 DRV5055-Q1、DRV5056-Q1
大家好、我们想使用霍尔传感器来测量两个部分之间的距离。
当前我们的航天设计如下所示。
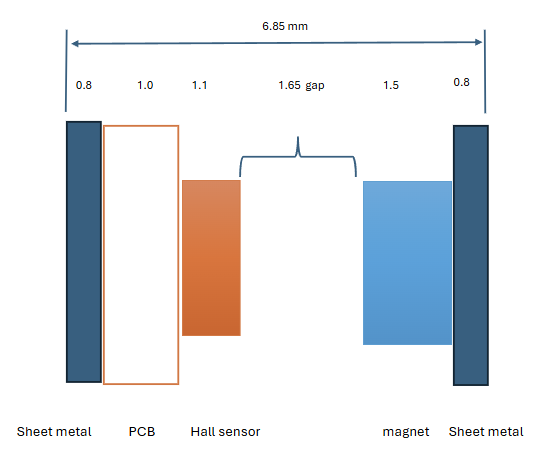
霍尔传感器和磁体之间的设计差距约为 1.65mm。
目标是测量 1.65+/–1.5mm (0.15~3.15mm)、精度预计为 0.1mm。
我的问题是 DRV5057-Q1 可以实现这一点吗? 还是任何其他建议?
非常感谢
Jerry
