

Other Parts Discussed in Thread: IWR6843AOPEVM
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: IWR6843AOPEVM
您好、
我当前正在使用 高架 3D 人员跟踪 上的示例 IWR6843AoPEVM 。
要启用静态点云数据、我在配置中添加了以下命令:staticRangeAngleCfg -1 1 1 1(静态进程启用)
但是、在发出sensorStart命令后、传感器会停止运行。 检查时 CCS 调试 日志中、我遇到了一条错误消息。
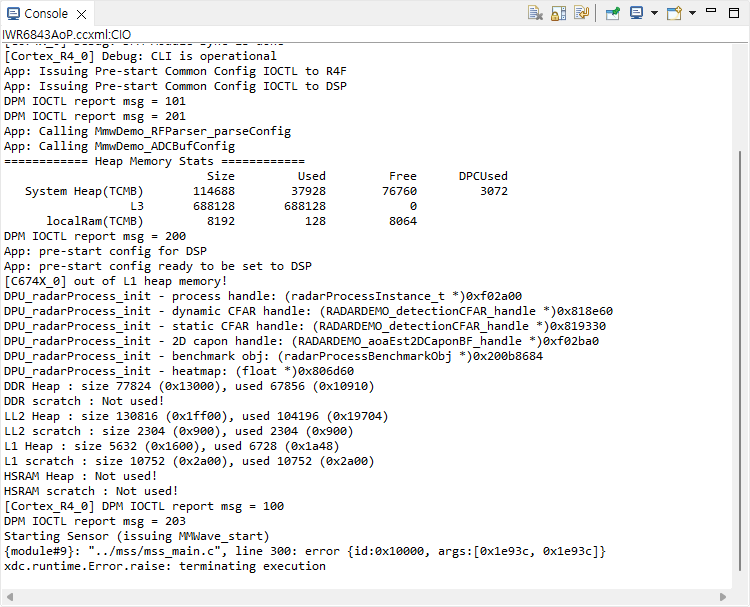
位于的相关代码 第 300 行、共 mss_main.c如下所示:
static void Pcount3DDemo_EDMA_transferControllerErrorCallbackFxn(
EDMA_Handle handle,
EDMA_transferControllerErrorInfo_t *errorInfo)
{
gMmwMssMCB.dataPathObj.EDMA_transferControllerErrorInfo = *errorInfo;
Pcount3DDemo_debugAssert(0); // Line 300
}我尝试使用frameCfg命令将帧周期增加到 500ms。
然而、结果不一致:有时、传感器仅运行 3 到 4 帧、然后在以相同的错误停止之前停止运行、而在其他时间、传感器在以完全相同的配置启动时立即停止。
我使用了默认pt_6843_3d_aop_overhead_3m_radial.cfg文件、只修改了以下两个参数:在中启用静态进程staticRangeAngleCfg和framePeriodicity在中调整frameCfg。
用于测试的配置如下。
% SDK Parameters % See the SDK user's guide for more information % "C:\ti\mmwave_sdk_[VER]\docs\mmwave_sdk_user_guide.pdf" sensorStop flushCfg dfeDataOutputMode 1 channelCfg 15 7 0 adcCfg 2 1 adcbufCfg -1 0 1 1 1 lowPower 0 0 % Detection Layer Parameters % See the Detection Layer Tuning Guide for more information % "<RADAR_TOOLBOX_INSTALL_DIR>\source\ti\examples\People_Tracking\docs\IWR6843_People_Tracking_PDFs\3D_people_tracking_detection_layer_tuning_guide.pdf" profileCfg 0 61.2 60.00 17.00 50 328965 0 55.27 1 64 2000.00 2 1 36 chirpCfg 0 0 0 0 0 0 0 1 chirpCfg 1 1 0 0 0 0 0 2 chirpCfg 2 2 0 0 0 0 0 4 frameCfg 0 2 224 0 500.00 1 0 dynamicRACfarCfg -1 10 1 1 1 8 8 6 4 4.00 6.00 0.50 1 1 staticRACfarCfg -1 4 4 2 2 8 16 4 6 6.00 13.00 0.50 0 0 dynamicRangeAngleCfg -1 7.000 0.0010 2 0 dynamic2DAngleCfg -1 5 1 1 1.00 15.00 2 staticRangeAngleCfg -1 1 1 1 antGeometry0 -1 -1 0 0 -3 -3 -2 -2 -1 -1 0 0 antGeometry1 -1 0 -1 0 -3 -2 -3 -2 -3 -2 -3 -2 antPhaseRot 1 -1 1 -1 1 -1 1 -1 1 -1 1 -1 fovCfg -1 64.0 64.0 compRangeBiasAndRxChanPhase 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 % Tracker Layer Parameters % See the Tracking Layer Tuning Guide for more information % "C:\ti\radar_toolbox_[VER]\source\ti\examples\People_Tracking\docs\IWR6843_People_Tracking_PDFs\3D_people_tracking_tracker_layer_tuning_guide.pdf" staticBoundaryBox -3 3 -3 3 -0.5 3 boundaryBox -4 4 -4 4 -0.5 3 sensorPosition 2.9 0 90 gatingParam 3 2 2 3 4 stateParam 3 3 6 20 3 1000 allocationParam 20 20 0.05 20 1.5 20 maxAcceleration 1 0.1 1 trackingCfg 1 4 800 20 37 33 120 1 presenceBoundaryBox -4 4 -4 4 0.5 2.5 sensorStart
您能否提供一个解决方案来解决此问题并成功在此实验中启用静态检测?
谢谢你。
