Other Parts Discussed in Thread: FDC2214, FDC2214EVM, FDC1004, OPA690, FDC2114
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:FDC2214 主题中讨论的其他器件:、 FDC1004、 OPA690、 FDC2114
您好!
我们的 ARM 机械产品在避障功能方面存在问题、我们需要确保机械感应 近物体的安全、 例如:人体或手掌等;
因此、我们选择 FDC2214来感应电容变化以确定物体距离、然后通知 MCU 使用物体向相反方向移动;
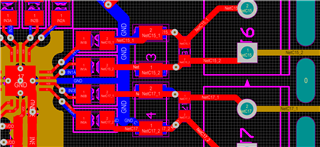
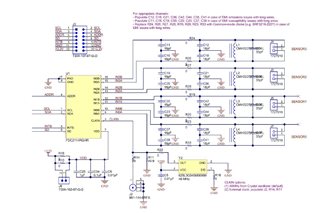
现在、我们的 FDC2214设计与 FDC2214EVM 类似、如下所示:
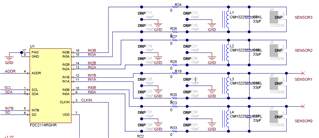
我们的机械臂是圆柱体,R=7-8cm,我们使用4个传感器来跨接4个方向(向上、向下、向左、向右), 每个 传感器是大约5*10cm (长度和宽度)的矩形;
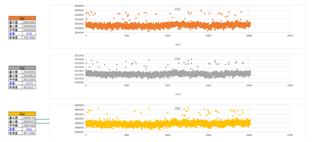
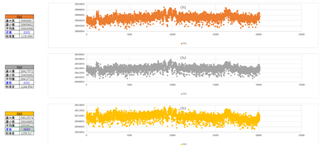
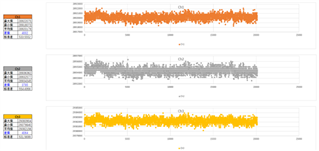
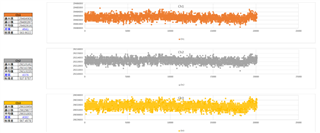
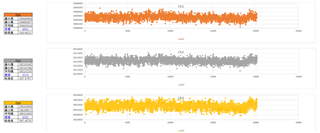
首先、我们 将传感器直接固定在机械臂的上方、 当传感器移动时、机械臂会产生一些噪声影响感测精度(噪声大于6000ft)、我们将设置为
感应 精度大于6000ft,有效感应距离小于6cm;
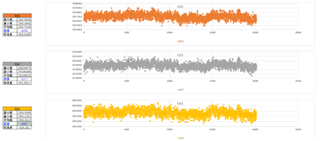
传感器、我们在机械臂 表面和传感器之间添加了屏蔽层、 传感器和屏蔽层表面之间的空间距离约为0.5cm、它可以屏蔽来自向下方向的噪声、
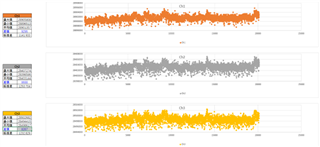
屏蔽层参数的 增益为1、与 传感器的相位位置相同、我们使用的放大器是 OPA690IDBVR、现在我们测试了噪声强度、 它具有明显的减弱功能、但设计并不是很强
因为屏蔽层和传感器之间有0.5cm 的空间、所以噪声将来自传感器周围;
我们的问题如下:
1.如何设计屏蔽层以消除传感器周围的噪声;
2.放大器 OPA690IDBVR 的成本要高得多,因此请在此设计中推广更好的放大器;
3.我们的最小测试距离是15cm,是否有更好的参考设计来解决噪音问题;