请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843AOPEVM 我发现 ROS 驱动程序有丢弃消息的趋势、我想它可能与过热有关?
我运行了2组数据收集、仅以两种不同的安装配置运行雷达。 请看此处两者的比较、第一个显然有很多丢弃的消息
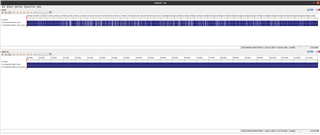
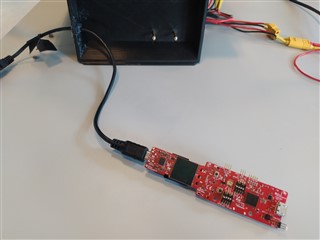
除了运行时间之外、这两组装置之间的唯一区别是安装配置。 顶部数据集以3D 打印案例的形式安装在一对支柱上:

而较低的数据集是在传感器位于桌子顶部时捕获的、传感器"暴露"在环境中
这可能是发热问题吗? 我们应该如何解决这种采样不一致的问题?