请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843ISK 主题中讨论的其他器件:IWR1843BOOST、 IWR1843
您好!
我已经使用 工业工具箱4.0.0中的交通监控实验室测试了 IWR6843ISK 和 IWR1843BOOST 演示板。
我使用了几乎完全相同的18xx 和68xx 70m_MIMO_3D 配置文件。
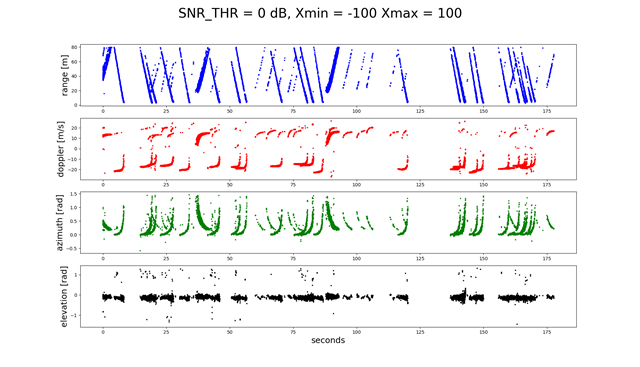
IWR1843卡在检查 XY 点云时性能显著提高:扩散、密度、杂波...
我还尝试使用相同的 CFAR 阈值。
我正在尝试确定可能的原因:
- PCB 损坏
-两个卡具有不同的天线设计
-不同的芯片规格
-电源噪声(1843时电池+ LDO、6843时为 USB3)
(笑声)
请帮帮我。
此致、
Massimo