您好!
但愿你一切顺利。
我一直在使用 LDC1000进行位置感应。 最近、我测试了 LDC1101。 我只是想快速确认一些事情。
在 LDC1000上、当我的传感器最接近目标(最低 Rp)时、我会收到数字值的高端值(大约30、000个数字代码)-当我离开时、传感器计数会减少。
在 LDC1101上、当我的传感器最接近目标(最低 Rp)时、如果数字值(0个数字代码)为低电平、当我移开时、传感器计数增加。
我查看了数据表以进行确认、但我只是想再次确认情况确实如此。
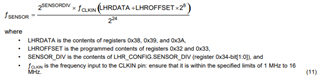
我的另一个问题是、在数据表中、LDC 被描述为通过将 LC 振荡保持在一个恒定水平来工作。 我能否确认一下、这是保持的振荡器上的电压电平吗? 我刚才做了一个示波器、看起来是调节的电压-下图是针对 LDC1101的。
祝你一切顺利、
Eric