Other Parts Discussed in Thread: MMWAVEICBOOST, IWR6843ISK
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843ISK 主题中讨论的其他器件:MMWAVEICBOOST、
你(们)好
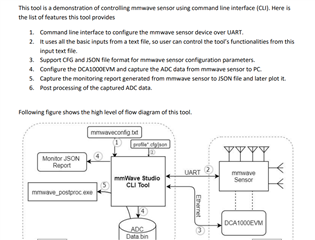
我忙于一个小组研究项目、该项目使用多种不同类型的传感器来监控健康状况。 所有传感器都需要与 ROS2集成在一起。 我负责雷达传感器、以获得生命体征(呼吸和心率)。 我可以访问 DCA1000 (和 mmwaveICBoost)板、但找不到有关如何实时使用该板的资源。 理想情况下、我希望能够通过串行方式将连续的原始 IQ 数据流输出到 python /c++程序中、以便进行处理、从而获取该阶段并发布到 ROS2包中。
我需要:
- 配置波形参数。
- 从雷达读取数据。
我知道如何在 mmWave Studio 中配置波形、但如果没有 mmWave Studio、我无法确定如何进行配置(您可以使用 mmWave 生成配置文件吗?)。 这是可行的吗?
此外、我已经看到 iwr6843isk 可以通过串行模块通过 UART 将数据发布到 python 中。 但我无法找到发送数据的格式、或者数据是预处理的还是原始 IQ 数据。
我已经为此付出了一段时间的努力。 我已经尝试过 mmWave Studio。 我已经尝试使用毫米波 ICBoost 和6843板的 ROS1驱动程序。 我甚至尝试使用 DCA1000 CLI 通过 python 子处理模块来启动和停止传感器、但这也不起作用。 是否有简单的方法只读取原始数据?
此致
网卡