请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843AOPEVM 您好!
我一直在使用 Industrial Toolbox 4.4.1 Lab ROS Point Cloud Visualizer 中的 ROS 驱动程序。 我将为 IWR6843AOPEVM 器件使用推荐的 MMW 演示固件、即 xwr64xxAOP_MMW_DEMOM.bin。 我没有做任何会改变驱动程序原始性能的更改。
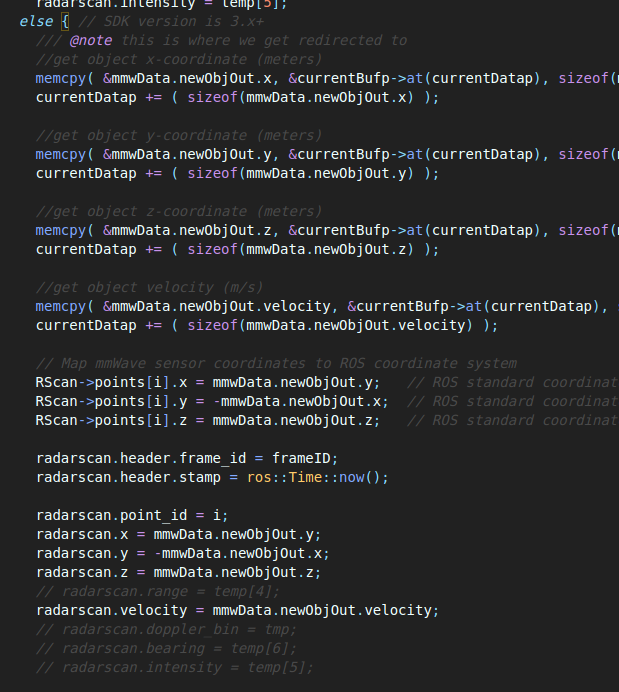
我注意到在使用 SDK 版本3.x+时正在构建和发布 RadarScan radarscan 消息。 当在演示运行期间响应 ROS 主题时、每条消息的速度值将返回为0。
在填充完整的 RadarScan msg 时、是否仅不支持 SDK 3.x+器件? (由于距离、doper_bin、轴承和强度值甚至都未计算在内)