

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1642BOOST 我想问一些有关 DSP 的问题。
在执行3D FFT DOA 估算后、我将处理坐标变换。
下面的数据是雷达板前面的一辆汽车、到达角为"0"、50m。
左图是行的最大值(50m)为右图。
如何像右图像一样将表示采样指数的 x 轴转换为 DOA (度数)?

根据 TI 文档: training.ti.com/.../mmwaveSensing-FMCW-offlineviewing_0.pdf
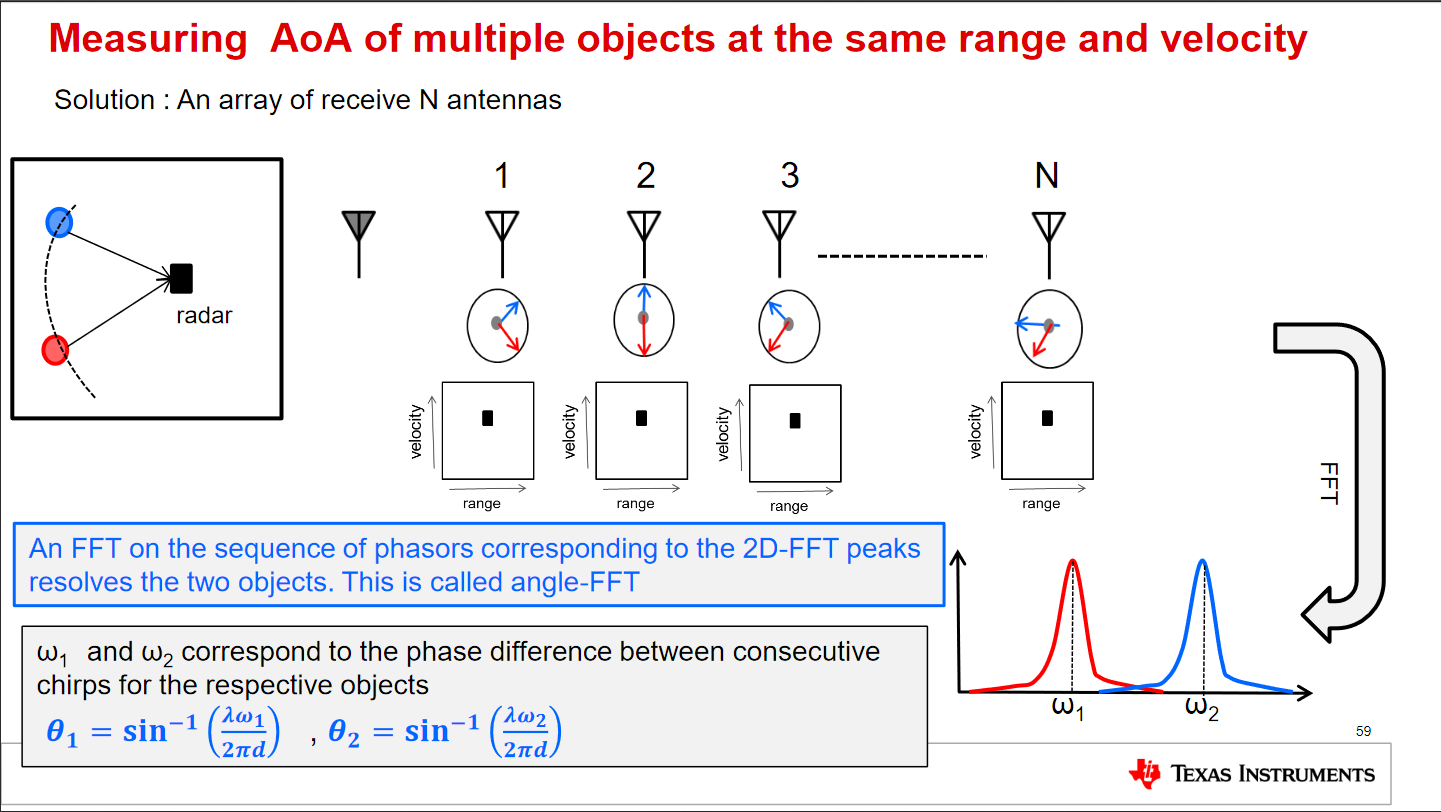
我的参数是:
λ= c/fc
D =λ/2
因此转换应该为:dDOA = arcsin (index/PI)。
但结果似乎是错误的。
非常感谢!
