

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR1642BOOST 主题中讨论的其他器件:IWR1443BOOST
您好!
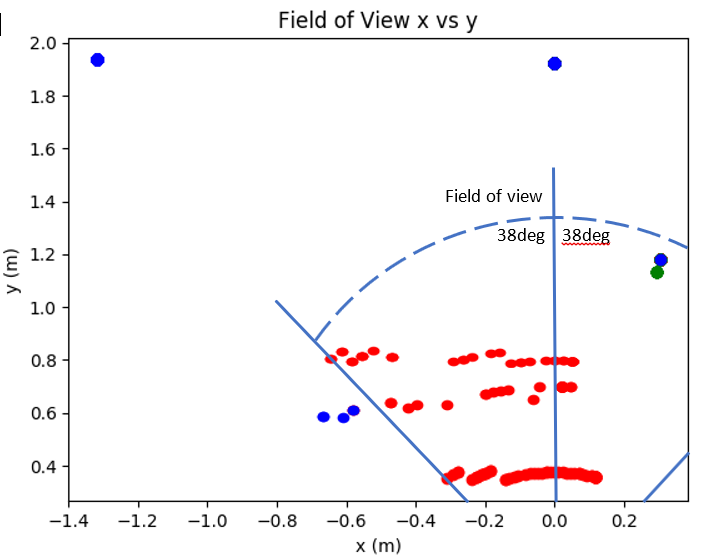
我刚刚开始在开发板上测试毫米波传感器。 我正在解析电路板上运行开箱即用演示时发送的串行数据。 我可以看到显示准确位置的 X 和 Y 2字节字段。 使用它们、我能够确定传感器的水平视场。 我还想找到垂直视场、我需要 Z 值。 但是、对于所有数据帧中的所有对象、Z 字段始终为0。 这是演示本身的限制吗? 如何配置传感器以输出所有对象的 Z 值?
这是水平视场的图。 在一个图形上叠加了三个试验、其中我缓慢地使物体更接近传感器位于原点的坐标 y 轴。 我希望在垂直视场中完成类似的任务。
传感器配置文件已附加。 e2e.ti.com/.../profile.cfg
感谢你能抽出时间。
Herman
