This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/634056/iwr1443-question-of-angle-measurement-in-swra549
您好!
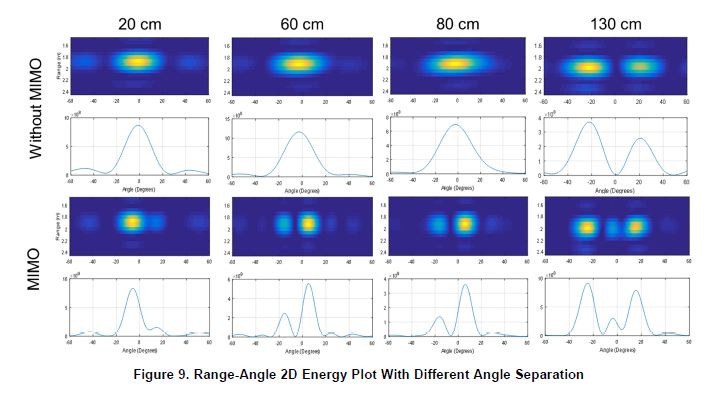
在 swra549的第7页中、它提到角度分辨率为17度。
但在图9中、似乎具有更好的角度分辨率。
请告诉我图9是如何制作的?
赵雨
您好、Akash、
我知道角分辨率是36度。
我的观点是、在图9中、每个电网的单位都非常小、看起来像是5度。
我想知道、为什么网格的单位是5度、这个数字是如何生成的?
BR、
赵雨。
非常感谢您的快速响应。
我的问题是"如何生成数字"、这意味着、如果使用 MIMO 时的角分辨率为17度、那么 MIMO 中的单位为何约为3度。
我认为该单位应与角分辨率相同。 由于图的单位是3度、这意味着信号的 SNR 可以被3度分辨。
此外、您能否提供该图的代码脚本?
感谢您的解释。
我可以理解"实际角度大于17度"。
我2πd 了角度是通过 SWRA554中提到的 sin 1 (wλ μ V/μ s)计算得出的、因为通过该公式、我们可以获得比"分辨率"更高的"精度"。
我的理解是、swra554中的上述等式可以获得高"精度"、但无法以相同的速度区分同一距离的两个物体。
我的理解是否正确?
非常感谢您的确认。