请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR1642 主题中讨论的其他器件: IWR1443、 TIDEP-0094、 MMWAVE-DFP、 TSW1400EVM
你好
我们正在设计能够同时估算高速、方位角和仰角的毫米波雷达系统。
考虑的芯片为 IWR1642。 在 IWR1642 EVM 中、由于所有天线都水平对齐、因此只能估算方位角。
在 IWR1443EVM 中、可使用三根 TX 天线(两根天线水平对齐、一根垂直对齐)估算仰角和方位角
和 TDM 或 BPM MIMO 技术。
根据上述结论、我认为 IWR1642芯片也可用于同时估算仰角和方位角
两个 Tx 天线的阵列、如 IWR1443。
下面是我要澄清的问题。
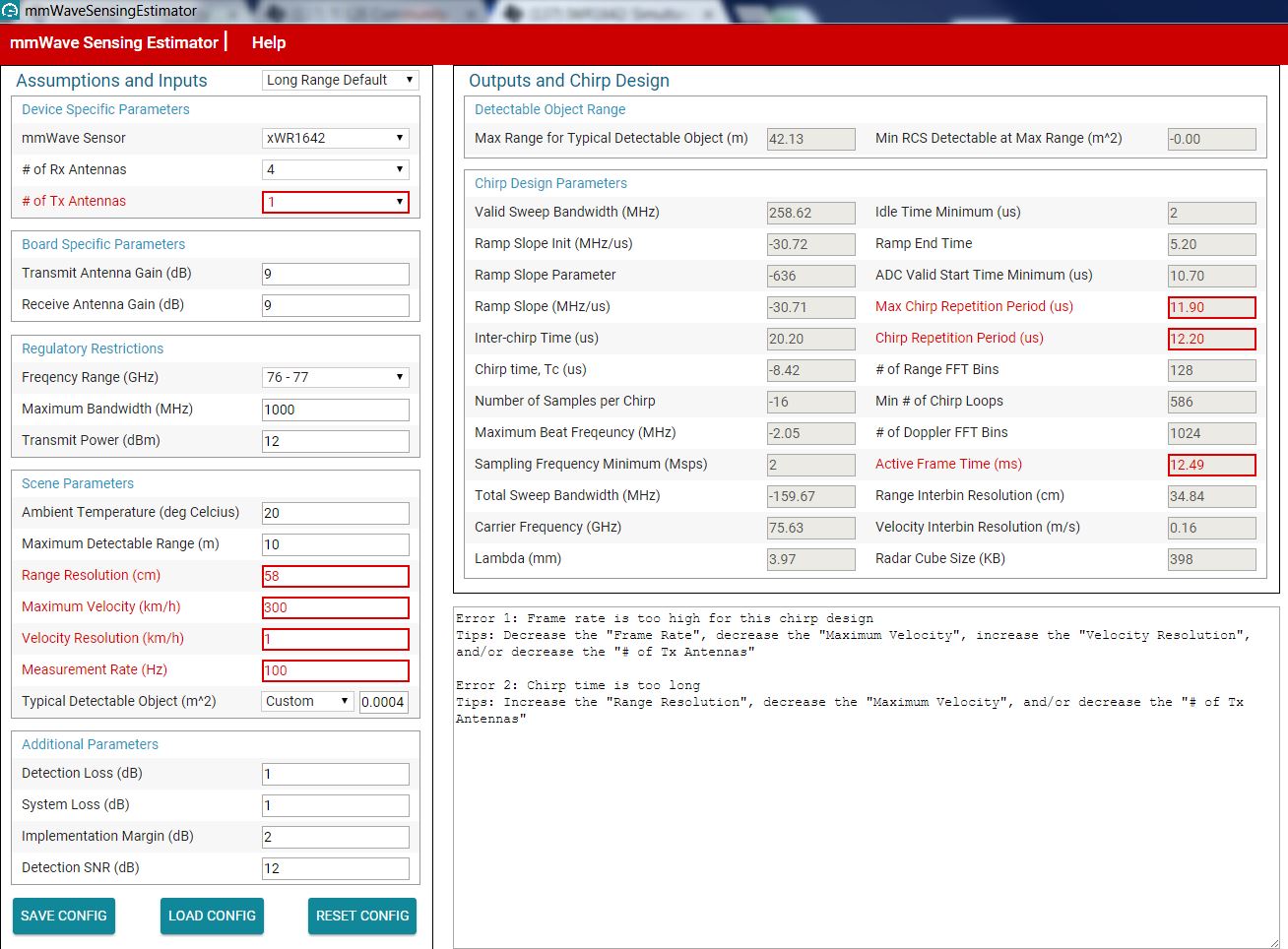
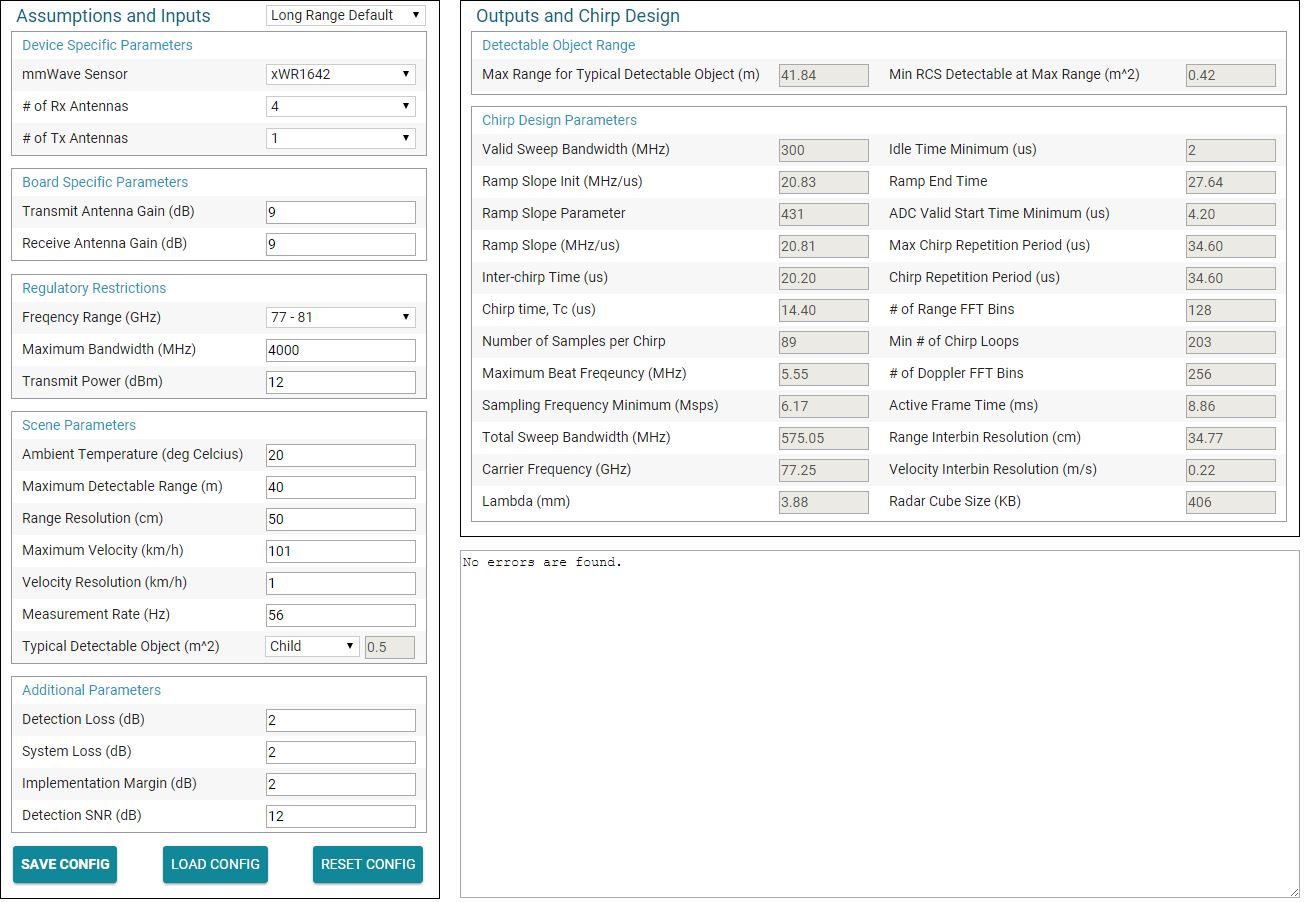
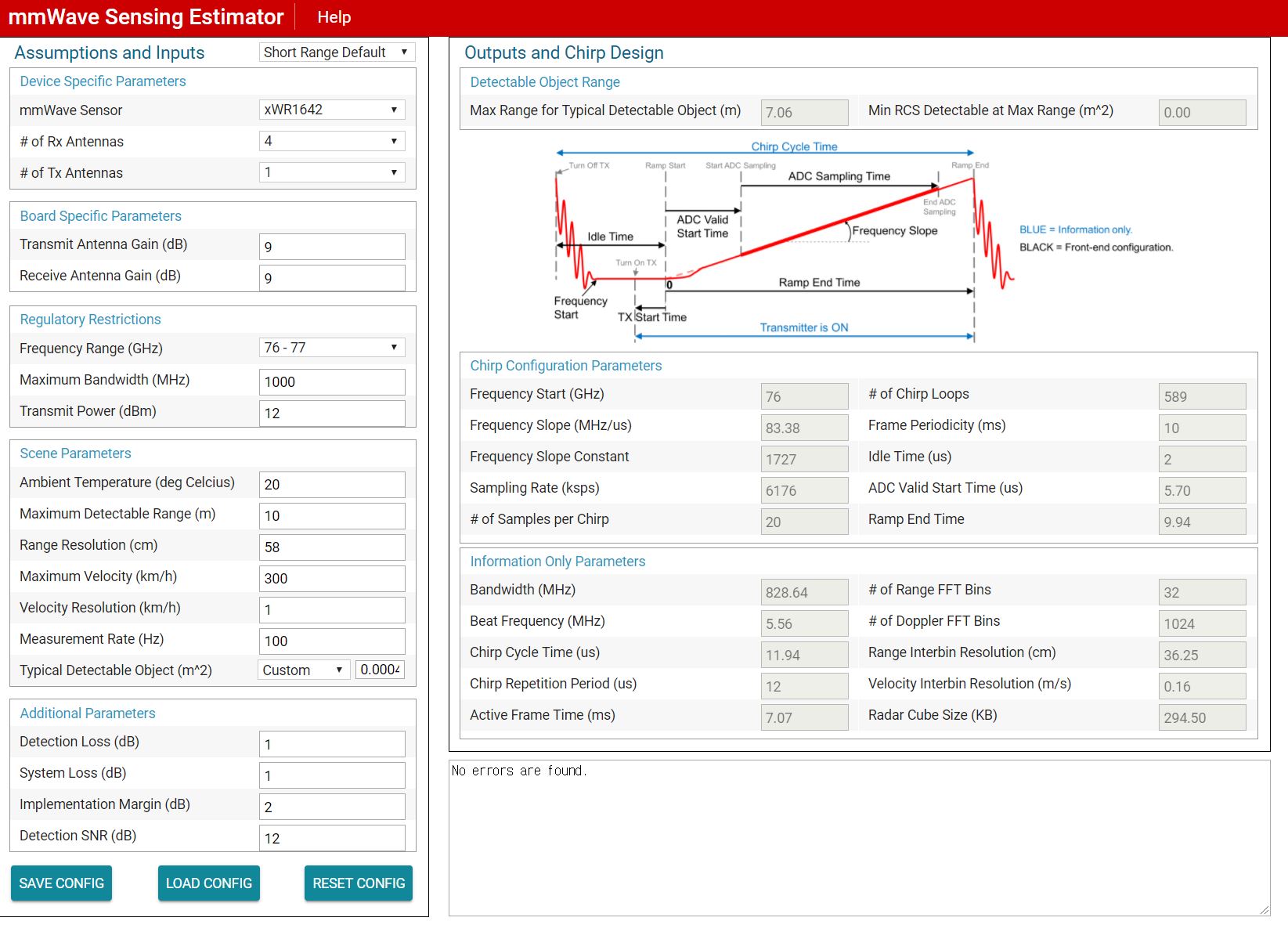
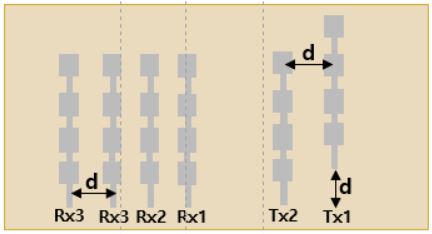
是否可以使用下图同时估算仰角和方位角。
2.在毫米波演示中、任何配置的速度都不能超过200km/h。 如果我使用 BPM MIMO 技术、
我能否获得高于200km/h (分辨率为1km/h 或以下)以及方位角和仰角的速度?
感谢你的帮助。