请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR1443 Thread 中讨论的其他器件: AWR1243
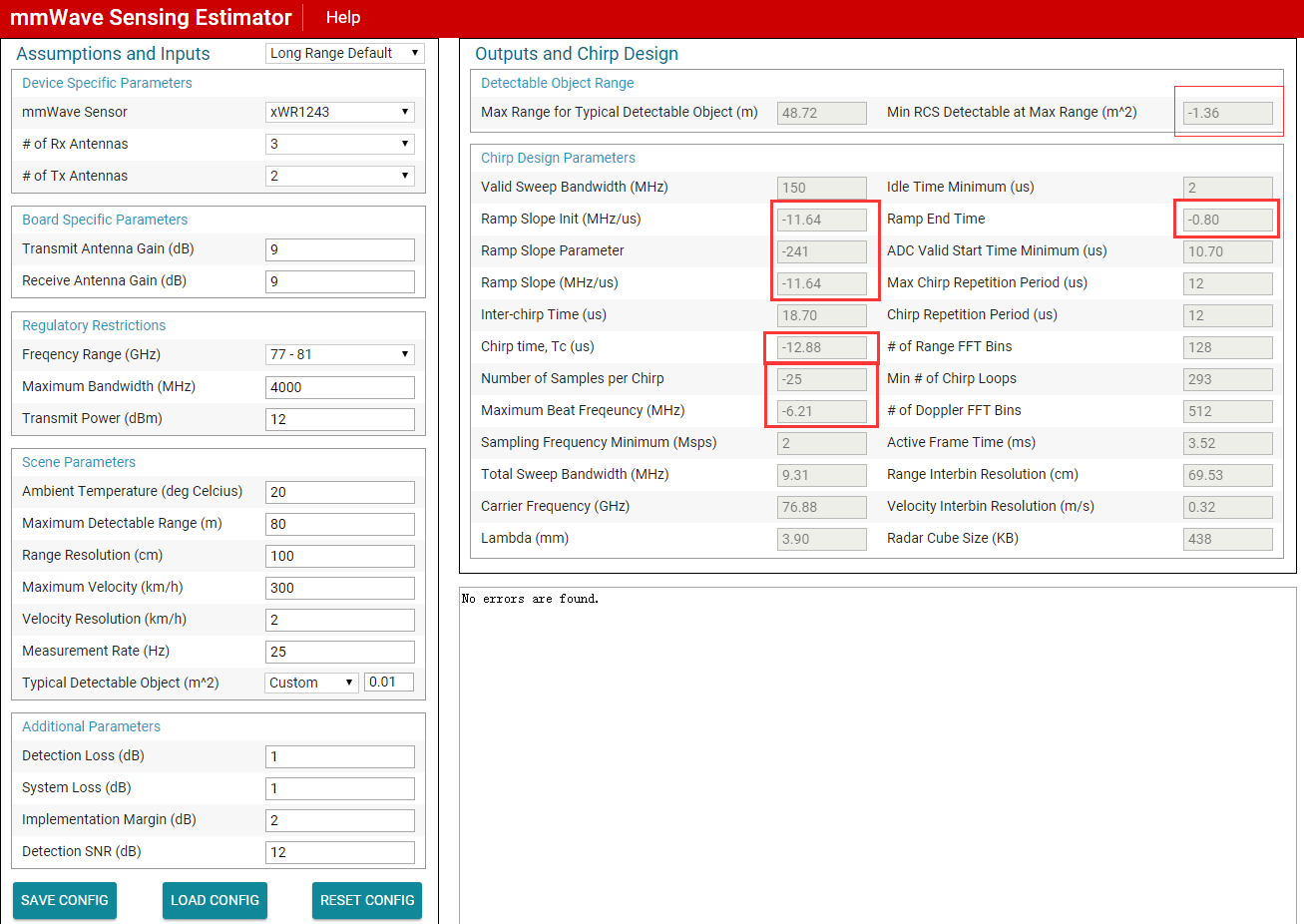
有一个物体(距离为70m、速度为300kmph)远离毫米波雷达、其可检测物体 大小约为0.01m^2。
我唯一关心的是获得距离信息。
(1)这种高速是否会对距离测量产生影响?
(2)如何使用 IWR1443BOOST 来实现我在 这种高速下的担忧?
感谢你的帮助。
将会
有一个物体(距离为70m、速度为300kmph)远离毫米波雷达、其可检测物体 大小约为0.01m^2。
我唯一关心的是获得距离信息。
(1)这种高速是否会对距离测量产生影响?
(2)如何使用 IWR1443BOOST 来实现我在 这种高速下的担忧?
感谢你的帮助。
将会