

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
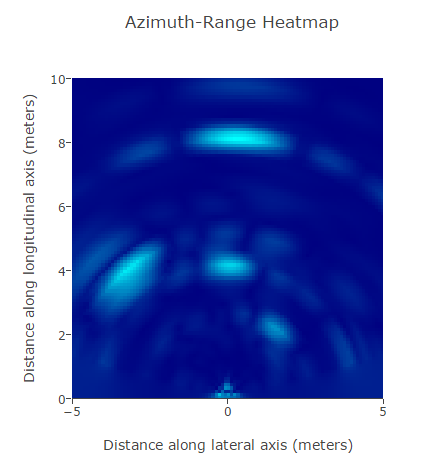
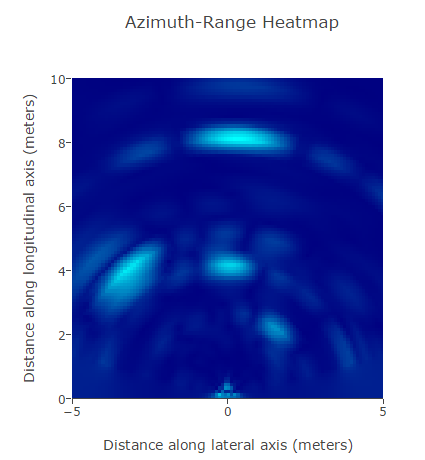
器件型号:IWR1642BOOST 客户评估 IWR162BOOST 并注意到目标似乎在不同的角度生成了错误的目标。 这看起来是径向尺寸中非常标准的同步函数。 但它似乎会产生限制、即您只能在给定的径向距离检测最强的目标。 否则,在相同距离但不同角度的较低强度目标可能会在信号的虚假径向能量中丢失。
此图像使用 TI 提供的优化设置。
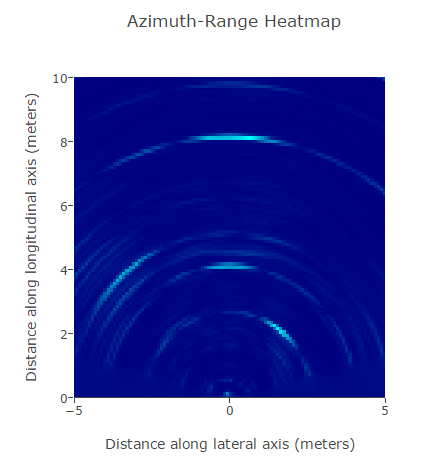
此映像使用 GUI 默认设置。 您可以在此数据中更明显地看到完整的径向噪声环:
请提供建议。
谢谢、
标记
