请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1642BOOST 主题中讨论的其他器件: UNIFLASH、 SYSBIOS、 MMWAVE-SDK、 AWR1443BOOST
工具/软件:Linux
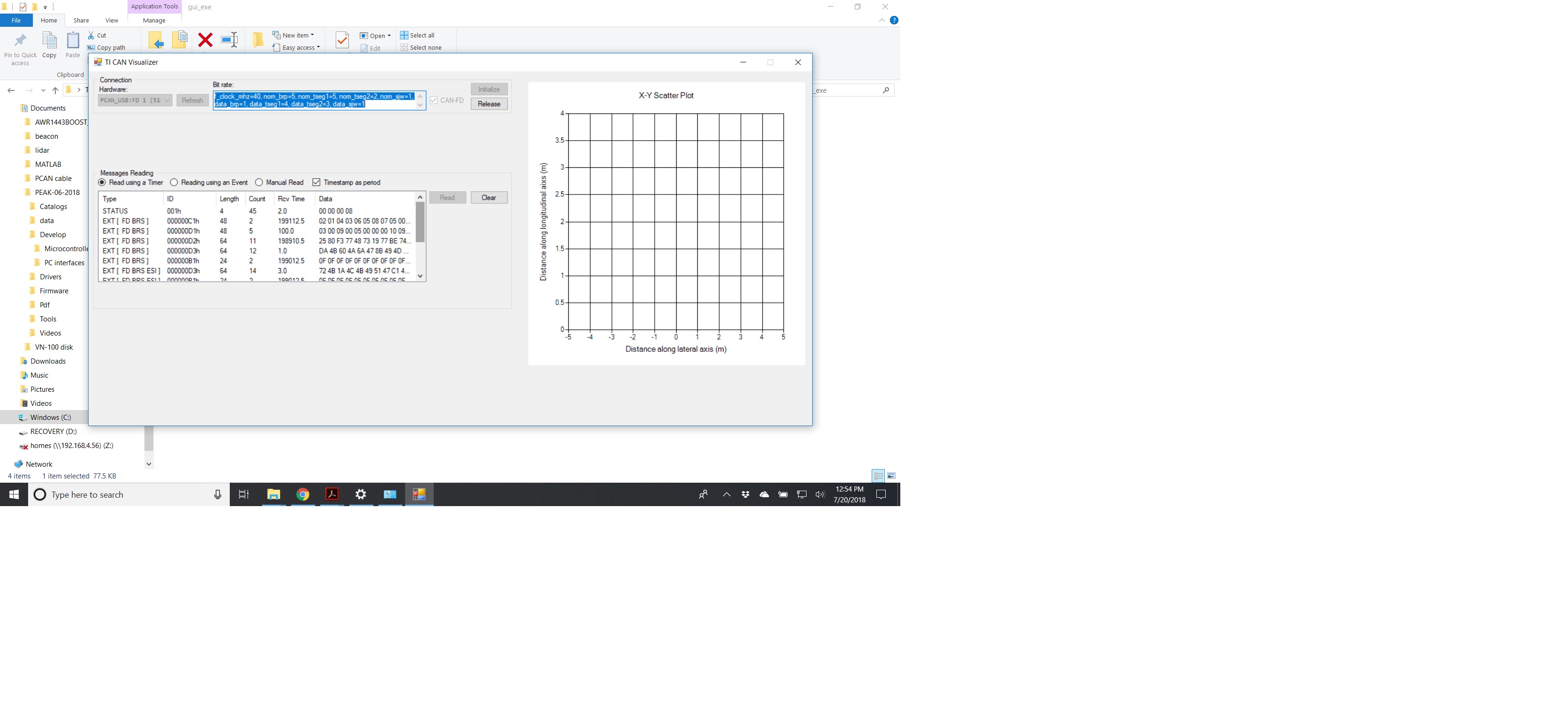
"mmWave_automotive_toolbox_2_1_2"中的"mmWave lab Object Data over CAN"实验演示。
我正在尝试通过 CAN 传输毫米波实验对象数据。 在使用 PCAN 电缆之前、我将系统设置为与具有 CAN 端口的 NVIDIA TX2配合使用。 我使用的系统是 Ubuntu 16.04、代码使用 CAN 套接字。 读取套接字时、始终返回-1。 连接到示波器、我看不到 CAN 信号(请参阅所附的、脉冲仅为20mV)。 我已经按照文档 swru508b.pdf 第2.3.3节中的说明、使用0 Ω 填充 R11和 R12电阻器;并移除 R4、R6、R28和 R63电阻器。