请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MMWCAS-DSP-EVM 主题中讨论的其他器件: AWR1843、MMWCAS-RF-EVM 、TIDEP-01012 、 AWR2243
您好!
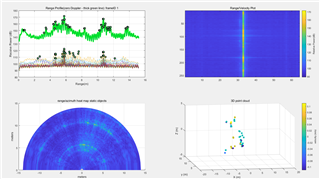
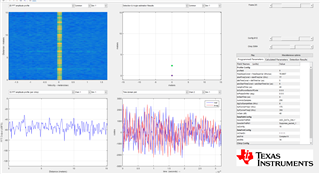
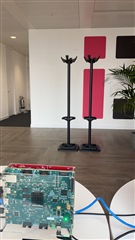
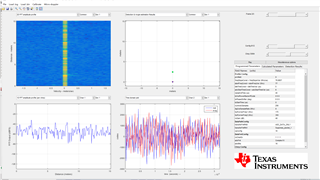
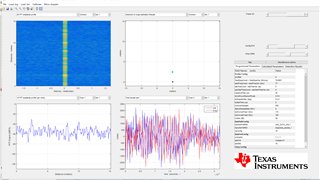
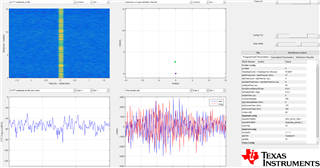
我正在使用 MMWCAS-DSP-EVM 检测2个金属水瓶(高反射率)、这2个水瓶距离雷达传感器仅130cm。 不过、从 mmWaveStudio 后处理图中的"4chip_CASCAAD_MIMO_EXAMPLE_EXAMPLE"文件夹中的脚本"cascade_mMIMO_signalProcessing.m"、以及我编写的 MATLAB 脚本、我认为没有检测到它们。 我试图放大距离-速度 图和距离-方位角图、但在130cm 的范围内未检测到任何内容。