请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR6843AOPEVM 您好!
我尝试根据使用 DCA1000捕获的原始数据开发自己的演示可视化工具。
我已经能够读取运行 OOB 演示的雷达的原始数据。
使用了以下配置:
{
"DCA1000Config": {
"dataLoggingMode": "raw",
"dataTransferMode": "LVDSCapture",
"dataCaptureMode": "ethernetStream",
"lvdsMode": 2,
"dataFormatMode": 3,
"packetDelay_us": 10,
"ethernetConfig": {
"DCA1000IPAddress": "192.168.33.180",
"DCA1000ConfigPort": 4096,
"DCA1000DataPort": 4098
},
"ethernetConfigUpdate": {
"systemIPAddress": "192.168.33.30",
"DCA1000IPAddress": "192.168.33.180",
"DCA1000MACAddress": "12.34.56.78.90.12",
"DCA1000ConfigPort": 4096,
"DCA1000DataPort": 4098
},
"captureConfig": {
"fileBasePath": "/home/mettmann/Hochschule/Master/masterarbeit/software/data",
"filePrefix": "datacard_record",
"maxRecFileSize_MB": 1024,
"sequenceNumberEnable": 1,
"captureStopMode": "infinite",
"bytesToCapture": 1025,
"durationToCapture_ms": 1000,
"framesToCapture": 5
},
"dataFormatConfig": {
"MSBToggle": 0,
"reorderEnable": 1,
"laneFmtMap": 0,
"dataPortConfig": [
{
"portIdx": 0,
"dataType": "complex"
},
{
"portIdx": 1,
"dataType": "complex"
},
{
"portIdx": 2,
"dataType": "complex"
},
{
"portIdx": 3,
"dataType": "complex"
},
{
"portIdx": 4,
"dataType": "complex"
}
]
}
}
}
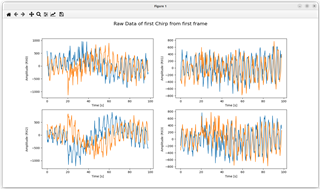
一个线性调频脉冲的复数原始数据如下所示。 不幸的是、数据的实部和虚部之间似乎存在振幅偏移。
此失调电压来自哪里?