

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR6843AOP 主题中讨论的其他器件:AWR6843、 AWRL6432和 AWRL1432
您好!
首先感谢快速回复。
我使用估算器工具检查了雷达存储器大小。
此外、我还想了解 Blow 参数中的线性调频脉冲总状态和雷达立方体存储器。

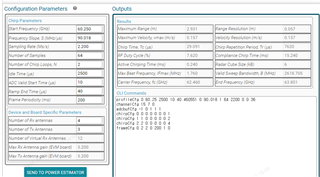
问题1: 是否认为每帧 chrip 图的绘制方式如下所示?[使用 AWR6843 AOP]
第一季度 a。 循环和帧 周期图

循环和周期性时间的定义是否相同?
起始条件。 线性调频脉冲图

对吗? 是否认为每个环路有3个字符?
q1.c 雷达立方体 mormoy

根据 估算器 ,雷达立方体大小为6KB (距离 bin (64)* virtaul ant (12)* loop (2 )= 6KB)
然后、第一个数组中的值是否意味着3chrip FTT 值?
我正在尝试 radardemo_aoaEst2DCaponBF_chirterRemoval 函数、但由于雷达立方体存储、我非常困惑。
请分享您的观点。
