请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843BOOST 主题中讨论的其他器件: AWR1642
您好!
我正在尝试解决演示示例中的方位角估算是如何计算的。 我使用的是 AWR1843Boost。
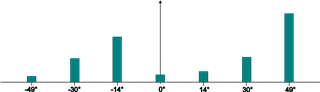
据我所知、单个反射器的角度可以使用公式 Φ= arcsin (omage / pi)计算、其中 ω 是两个相邻接收天线的信号之间的相移。 只要在给定的距离/速度库中只有一个反射器、就可以正常工作。 但是、如果有多个反射器"位于"同一距离/速度槽中、则必须首先执行 "角度 FFT"来分离不同的相移分量。 对于 AWR1843EVM、我最多可以使用8根虚拟天线。 这样、我就可以分离相移大于 delta_omega =(2 π/8)的对象。 由于 FFT 的性质、我现在只为 能够观察到的可能相移提供了8个不同的(固定)值。 使用上述公式(φ= arcsin (omage / pi))、我现在只能分辨某个对象是否位于-49deg、-30deg、-14deg、0deg、14deg、 30度或49度。
不过、演示示示例中的精度似乎 远高于分辨率。 即使多个物体落在相同的距离/速度下也是如此-二进制文件。 您能告诉我、这是如何完成的吗?
此致
马里奥