请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843 为什么非波束控制和波束误差最大距离相同、而角度小于40度?
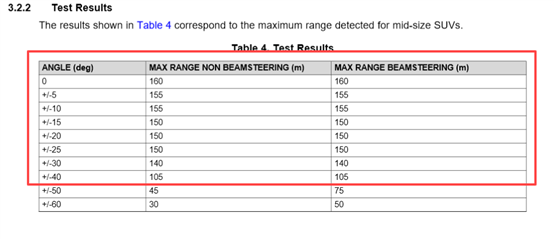
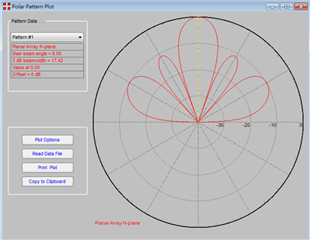
我们查看了设计指南"角雷达波束控制参考设计"、 当角度小于40度时、最大距离非波束控制和波束误差的测试结果相同。
如果非波束控制模式是使用 TDM 的 MIMO 模式、则具有与波束控制模式相同的检测能力毫无意义。
由于我无法从 TI Resource Explorer 中通过 Automotive Toolbox 找到该演示、因此我想知道非波束控制的配置文件设置。
我想这不是 TDM (AWR1843 EVK)的 MIMO 模式、它应该同时传输 TX1和 TX2与 TX3、以获得更长的检测范围。
但 HFOV 应通过同时发射 TX1、TX2和 TX3来缩小、因此+-40度与波束控制模式保持相同的距离检测、这没有意义。
为了澄清问题、您能帮助我获取更多信息吗?
非常感谢。