

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/1392093/awr6843--
器件型号:AWR6843工具与软件:
早上好!
我使用 AWR6843雷达 、并运行具有分类功能的 AWR6843 CPD 示例中的二进制文件。 我一直以示例中的配置(请参阅附件)为基础。
当我在车上测试演示时、我听到了奇怪的洋蓟。 除了1个点、我在同一模式中始终获得9个点(请参阅附加的图像)。
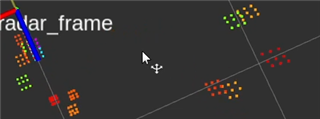
什么会导致这些伪影? 可视化效果显示在 ROS 中、但我使用 MATLAB 可视化工具 GUI 时有相同的伪影。
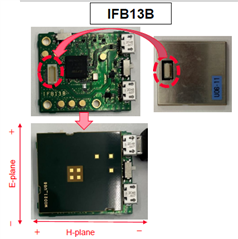
我使用的是 一家供应商提供的天线模块(见附图)。 供应商提供的唯一信息是更改线性调频脉冲配置中的天线顺序(请参阅随附的照片)

我不熟悉雷达技术、因此请原谅我提出任何"愚蠢"问题或措辞错误。
此致、
Niklas
e2e.ti.com/.../vod_5F00_6843_5F00_aop_5F00_overhead_5F00_2row.cfg
