请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWRL1432BOOST-BSD 主题中讨论的其他器件:TCAN4550、 AWRL1432
工具与软件:
尊敬的专家:
我想获取目标列表(检测到的目标数组、包括位置和速度)并通过 CAN 进行传输。 我根据要尝试的演示源代码进行了以下修改。
设置 gMmwMssMCB.guiMonSel.pointCloud = 1 (guiMonitor 的第一个参数)
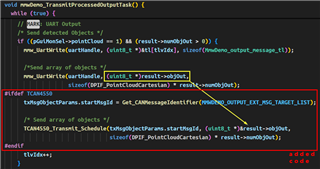
2.添加可以传输"void mmww Demo_Transmit esedOutputTask()"函数中的代码,见下图
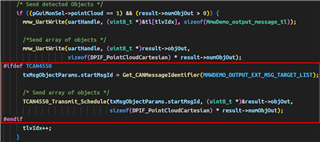
但存在一个问题、"GET_CANMessageIdentifier"函数没有"MMWDEMO_OUTPUT_EXT_MSG_TARGET_LIST" 类型、它被判定为"CAN_MESSAGE_MMWDEMO_MAX"
您能给我一些建议、以便 通过 CAN 实现目标列表数据传输吗?
B.R.