请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWRL6432BOOST 主题中讨论的其他器件:SysConfig、 AWRL6432、AWRL1432
工具与软件:
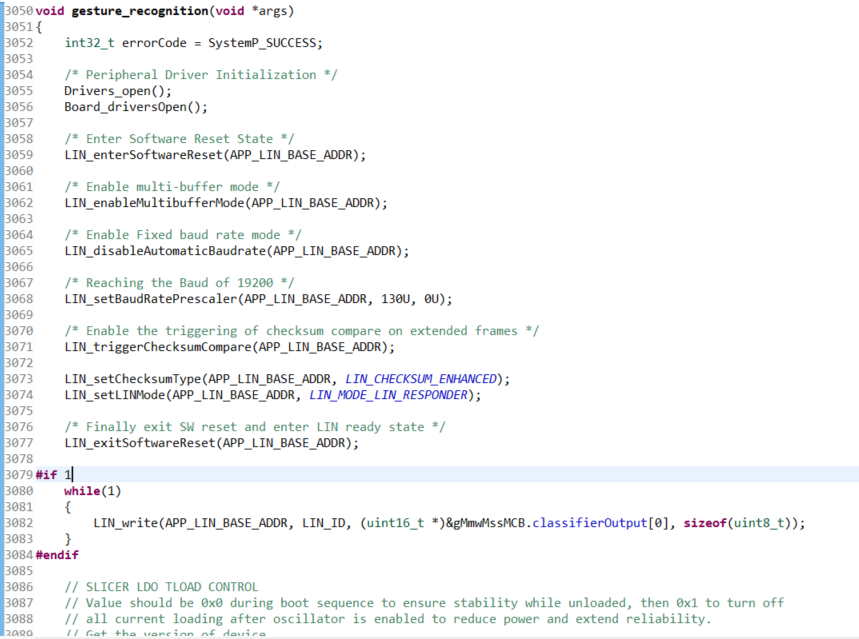
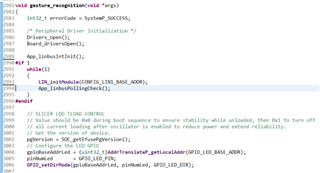
我们要参考示例代码 radar_toolbox_2_10_00_04-Kick_to_Open
添加了 MMWAVE_L_SDK_05_05_00_02-LIN_EXTERNAL_RESPONER_INTERRUTS
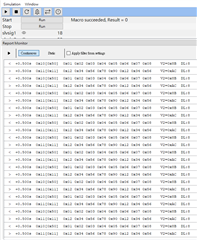
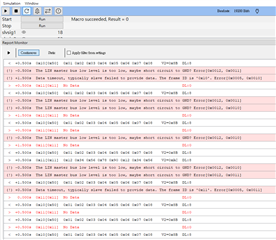
为了添加 LIN 总线功能、程序启动后、只发送和接收一次命令、而不会出现 LIN 总线消息。
是否无法使用中断方法来使用 Kick_to_Open 中的 LIN 总线功能? 你有什么其他建议吗? 谢谢!