工具与软件:
您好!
我最近通过液位传感演示使用 IWRL6432BOOST EVM 进行了一些开发、并对工业可视化工具和配置模块化提出了一些问题。
我安装了 MMWAVE_L_SDK_05_05_02_00和 RADAR_toolbox_2_20_00_05。
我希望将流式传输的数据的帧速率提高到~45Hz 或更高(最终)、并将每帧流式传输的数据量更小/更集中。 我一直在使用工业可视化工具和配置文件来取得一些初步进展。
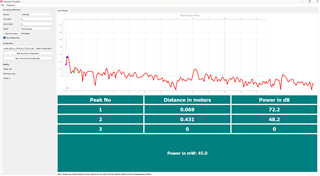
使用原封不动的线性调频脉冲配置进行高精度/快速更新、我在工业可视化工具上收到: 
我修改了配置文件、仅将"zoomCfg 16384 1 3"更改为"zoomCfg 16384 1 2"、以更改检测到的点数: 
我现在看到统计数据中有"points: 2"、但图中仍然有3个点云、输出 JSON 文件中有3个点云。 当我将 rangeSelCfg 0.0 10.0等参数更改为 rangeSelCfg 0.0 5.0等参数(用于更改最小/最大范围)或更改 chirpComnCfg 的"numOfAdcSamples"参数(例如从512更改为1024)时、我也遇到了在可视化工具中显示更改的问题。 我还注意到、绘图轴通常不与可视化工具上的数据对齐(例如、第二幅图像中的点1对应于72.2dB 的幂、在图形中仅看起来像~55dB)。
无论配置参数如何、我用于读通输出数据的输出 JSON 文件似乎都为距离曲线(~255行)输出恒定数量的数据。 它还始终包含3个点云数据集、并将"numDetectedPoints"显示为3、尽管可视化工具统计信息显示不正确。
我已经通读了"SDK"以了解参数、还浏览了其他 Motion_Presence_Detection_Demo_Tuning_Guide 工具箱/雷达液位感应特定文档。 我想知道、就配置参数功能对输出数据和图形的影响而言、我是否误解了配置参数功能。 非常感谢您对此流程和调整帧速率提出任何建议。
谢谢!
Elliot