

Other Parts Discussed in Thread: TIDA-050060
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TIDA-050060 大家好、
我的客户在这里有一些问题。
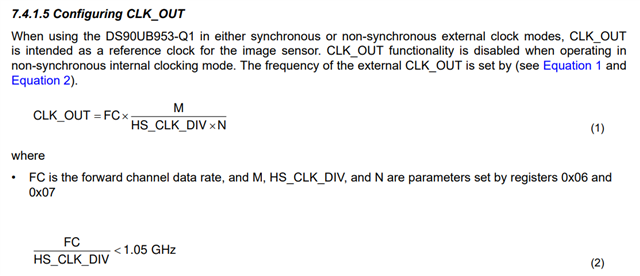
如何将 CLK_OUT 设置为24MHz?
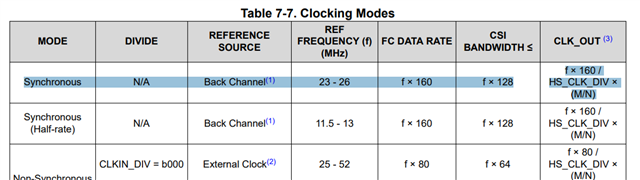
与下面的数据表公式1和2相关。 FC 是正向通道数据速率、M、HS_CLK_DIV 和 N 是由寄存器0x06和0x07设置的参数。 这意味着我需要写入 寄存器0x06和0x07、然后我可以实现24MHz CLK_OUT。 是这样吗?
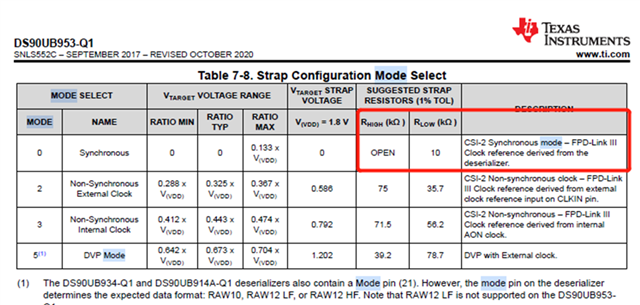
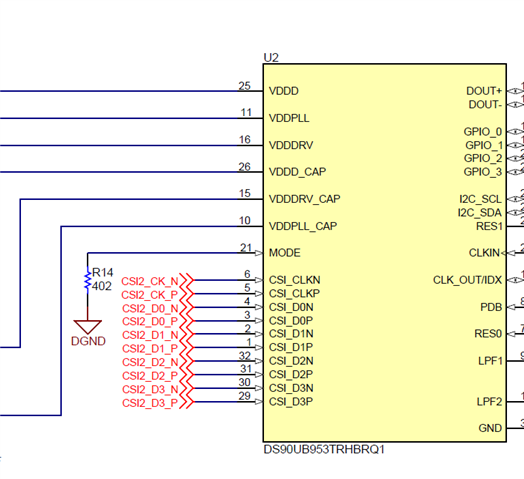
2.选择模式0、其中 Rhigh/Rlow =打开/10k Ω 作为数据表下面的第一张图片。 但 TIDA-050060的原理图显示 MODE 引脚连接了402 Ω 至 GND、如下面的第二个图片所示。 我认为10千欧是正确的。 只是想仔细检查一下。
由于我的客户正在按照 TIDA-050060设计摄像头模块、 我们是否有任何文档可以支持客户编写 ser/DES 寄存器?
如果我们已经设置了 ser/des 寄存器、PMIC 和图像传感器。 我们需要注意什么问题? 或者只需将图像传感器连接到 ser/des 以进行显示。 一般情况下、图像会显示在屏幕上?
Br、
吉米
