Other Parts Discussed in Thread: LAUNCHXL-CC1312R1
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:CC1312R主题中讨论的其他器件: SYSBIOS
工具/软件:
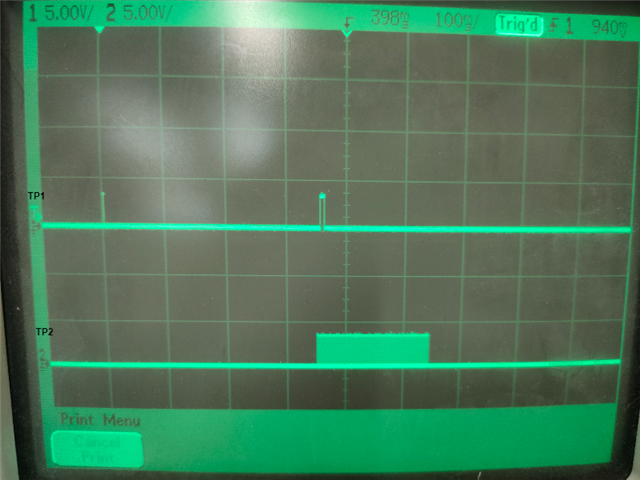
从待机模式返回后、RF、TIMER、UART 等会进行初始化并发送数据包。 初始化后、大约需要 30ms 计时器中断发生。 这是由振荡器稳定时间造成的吗? 还有、是否有方法可以缩短这一时间?
Other Parts Discussed in Thread: LAUNCHXL-CC1312R1
工具/软件:
从待机模式返回后、RF、TIMER、UART 等会进行初始化并发送数据包。 初始化后、大约需要 30ms 计时器中断发生。 这是由振荡器稳定时间造成的吗? 还有、是否有方法可以缩短这一时间?