

Other Parts Discussed in Thread: UNIFLASH, SYSCONFIG, CC1352P7
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: CC1352P7
Thread 中讨论的其他器件: UNIFLASH、 SYSCONFIG、
您好、
这与我成功使 Docker 和 Linux 端正常工作的最后一张票证有关。
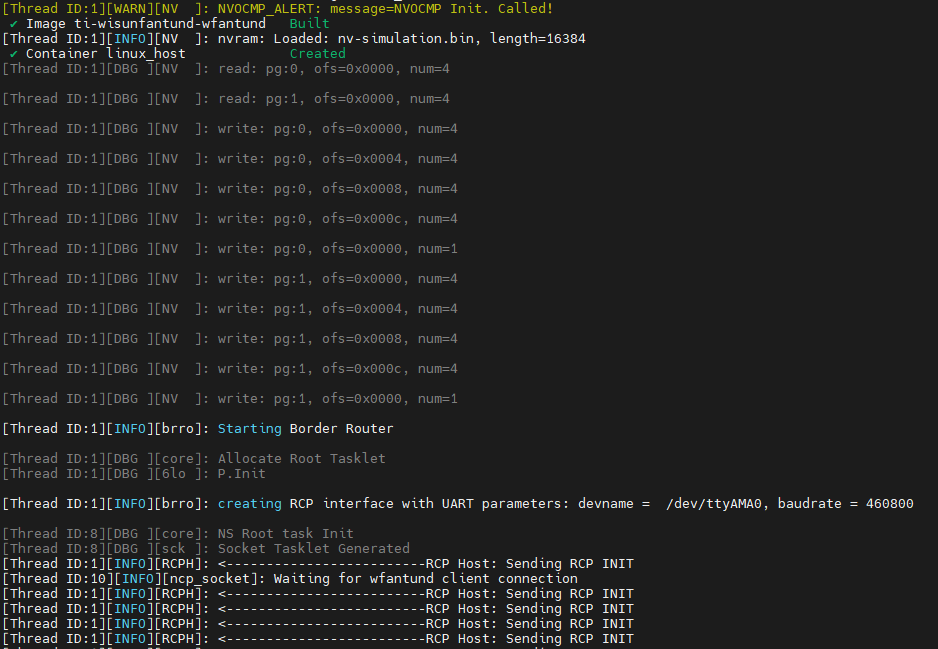
我有 LP-CC1352P-1 使用 oroginal rcp_lmac 示例、RCP 没有从 br 获取任何内容。 请参阅我的屏幕截图、其中系统一直在发送并等待响应。 我被告知的默认波特率已经是 460800。
到目前为止、我还没有对节点进行编程、不确定这是否很重要、因为我原本希望先从 rcp_lmac 获取内容。 是否有任何可以通过其他 UART 发送来测试的命令/抖动?
我甚至写它是为了发送一个虚拟响应、但仍然没有。 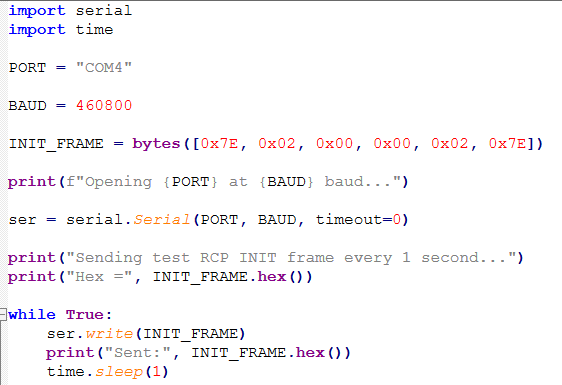
谢谢、
AliGeda

