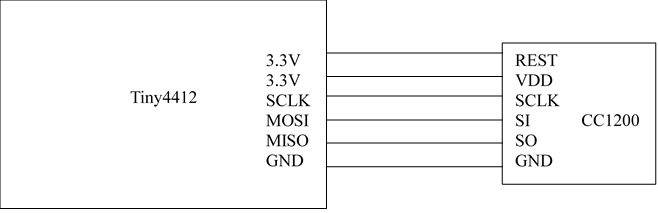
Other Parts Discussed in Thread: CC1200
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:CC1200 主题中讨论的其他器件: SimpliciTI
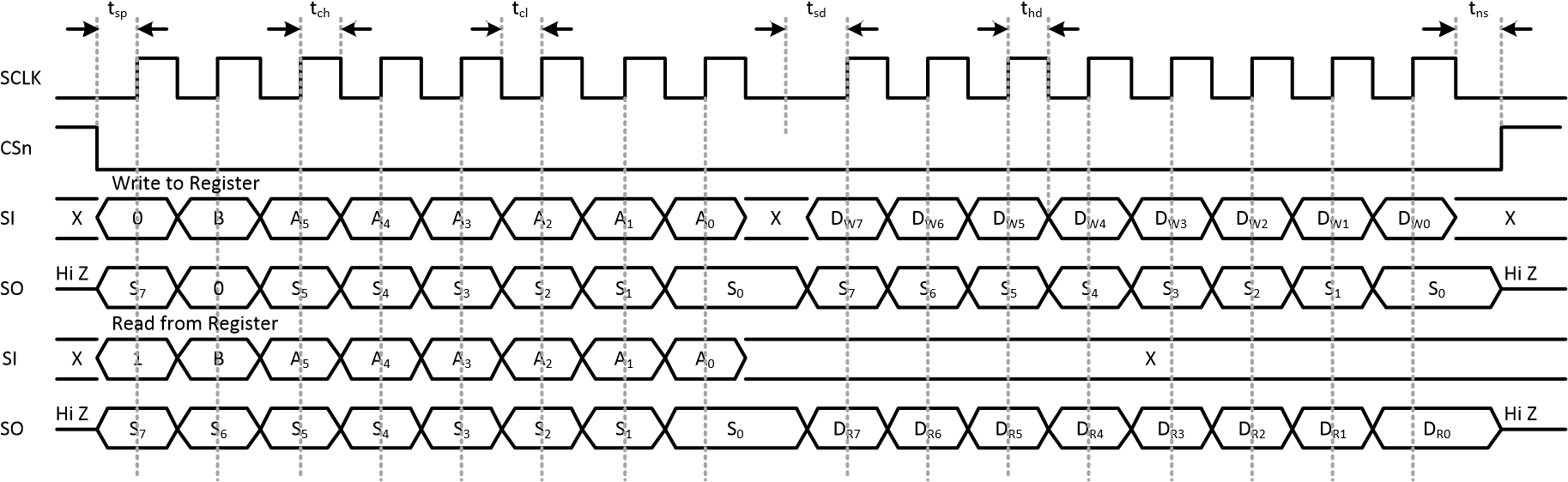
从该图中可以看到、 联系 SPI 访问类型中的单寄存 器访问、我们认为如果我们向 SI 引脚发送0x80、这意味着我们要执行的操作是从 CC1200读取寄存器的值、SO 引脚将返回0x00 (地址)的值。
如果 CC1200在我们读取寄存器之前通电、则该值为复位值(默认值) 0x06。
因此、当我们向 SI 引脚发送0x80时、SO 引脚应返回一个8位芯片状态字节和一个8位数据字节(0x06)。
SI:0x80
因此:0x0F 0x06
我的理解是否正确?
当我们写入寄存器时、SO 引脚首先返回8位芯片状态字节、为什么 S6为零?