请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:CC1312R7 当修改 uart2callback 示例以接收多个 char 时、即使在 UART 缓冲区中接收到数据、也并不总是获得回调。
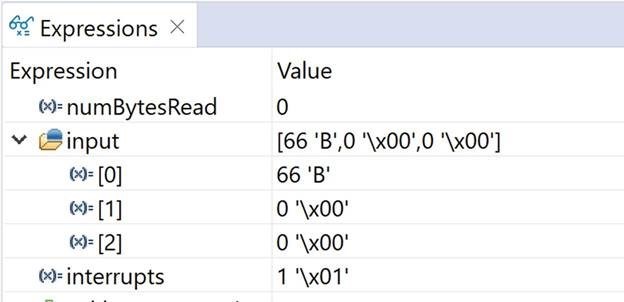
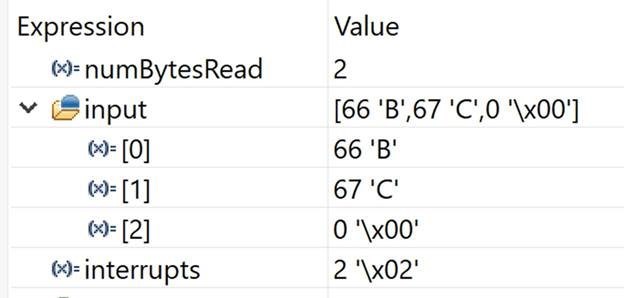
我在接收到第一个数据时得到一个回调、但当我 再次调用 UART2_READ 时、我没有获得剩余数据的任何回调。
何时调用回调?
当修改 uart2callback 示例以接收多个 char 时、即使在 UART 缓冲区中接收到数据、也并不总是获得回调。
我在接收到第一个数据时得到一个回调、但当我 再次调用 UART2_READ 时、我没有获得剩余数据的任何回调。
何时调用回调?