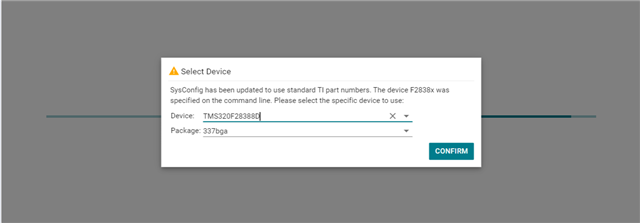
Part Number: TMS320F28388D
Other Parts Discussed in Thread: TMDSCNCD28388D, SYSCONFIG, C2000WARE
您好!
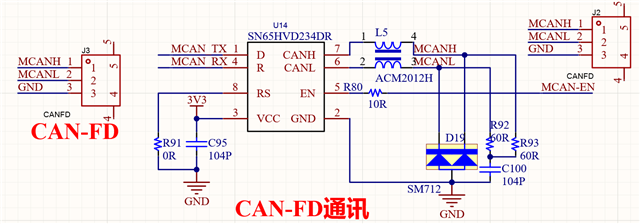
我正在使用TMS320F28388D的CANFD通信代码,我在使用官方提供的代码时发现问题如下:
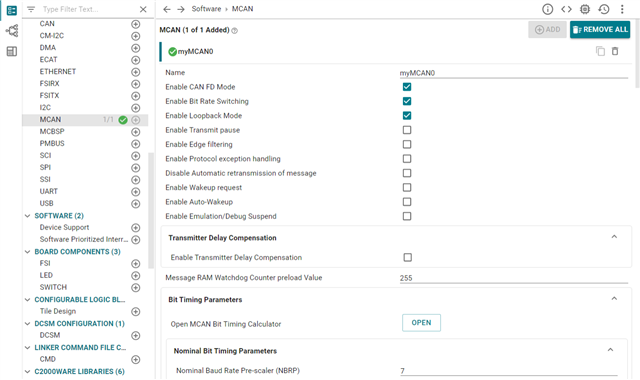
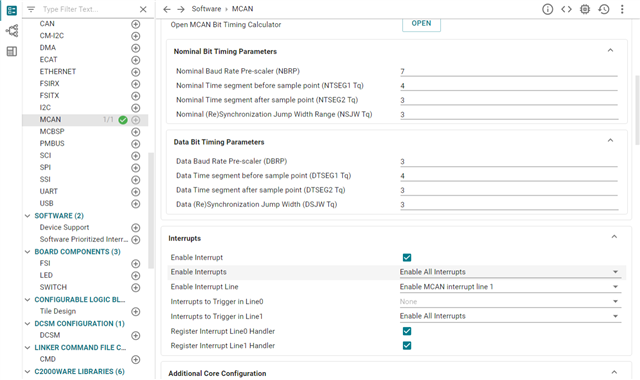
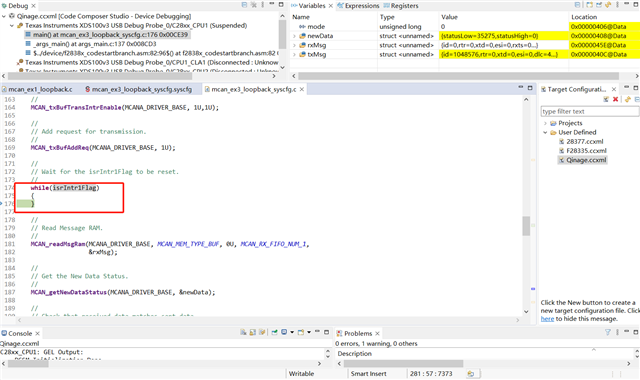
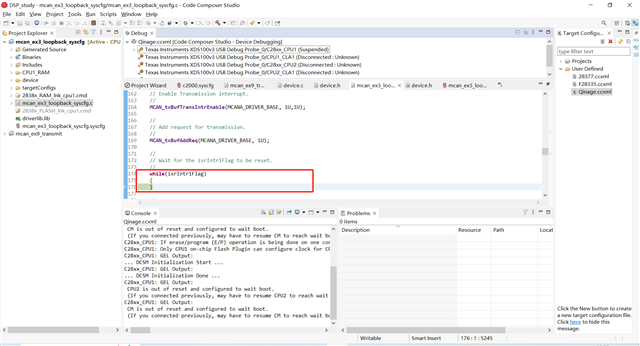
我使用的例程是MCAN_ex3_loopback_syscfg;在下载程序后进行仿真发现代码卡在while循环里面:
具体位置如下:
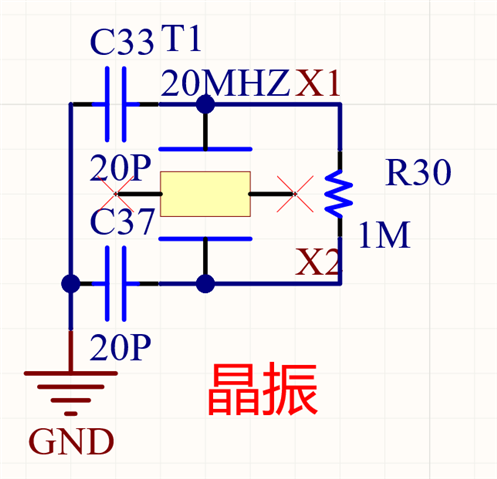
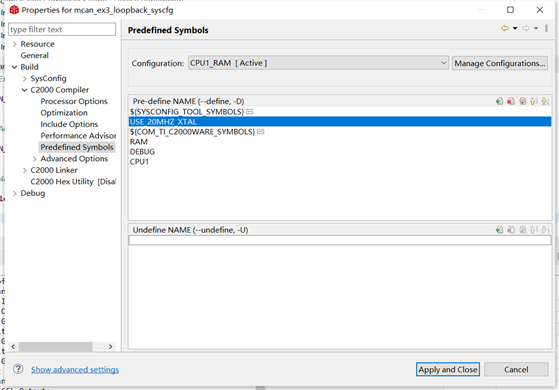
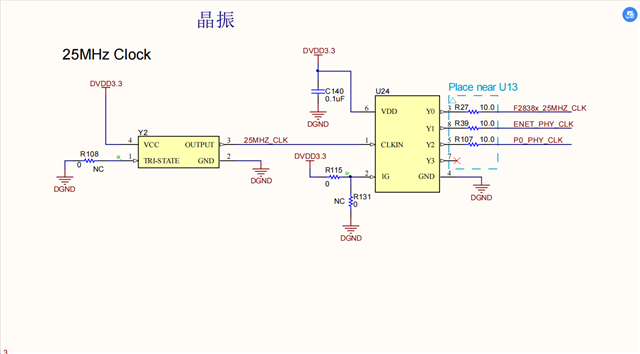
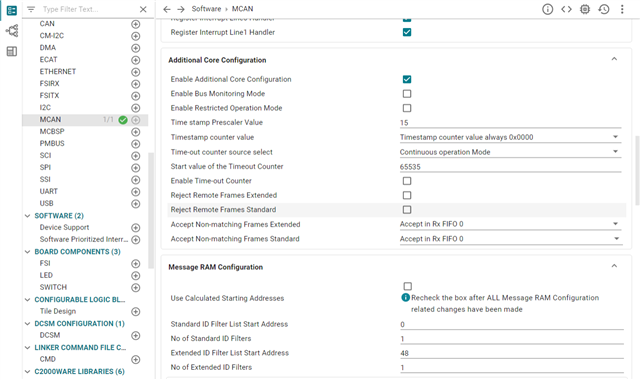
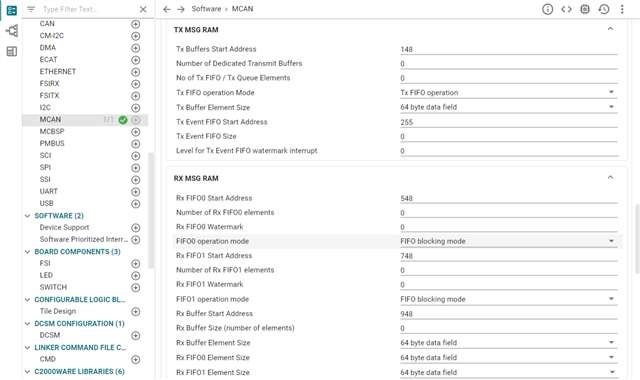
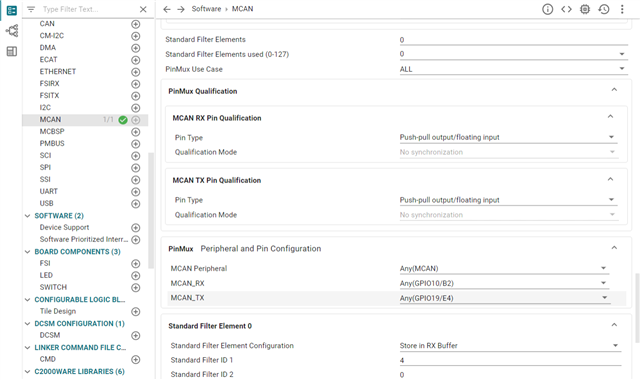
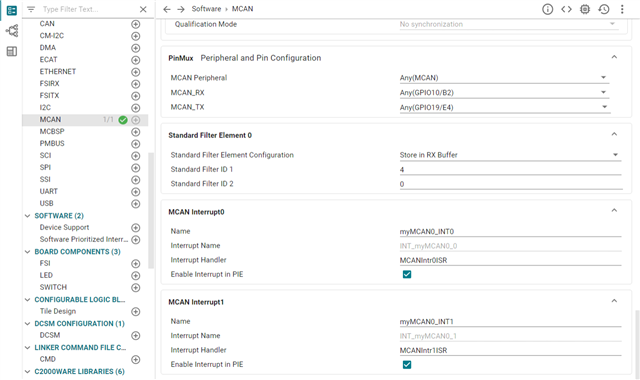
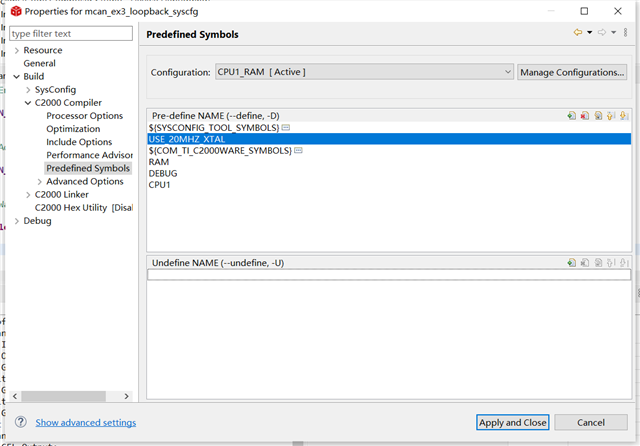
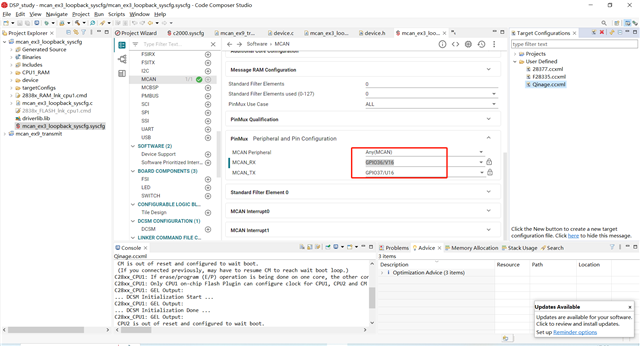
在这个例程中我只修改了我的晶振时钟和引脚,由25MHz变为了20Mhz,引脚由原本的GPIO30,31改为了GPIO36,37,使用了软件配置,具体如下:
请问我该如何解决这个问题,来实现CANFD的通信收发代码?
感谢答复!!