如题,最近在使用基于官方的28035 PMSM Sensorless 调试,想做无传感电机控制,在DRV8301驱动板上进行。Level 1--Level 5顺利调试通过,但是在Level 6时,根据无传感的调试文档,从lsw=1的开环阶段切换到lsw=2的转速闭环阶段,rg1.Out到smo1.Theta存在较大偏移,很大程度都由于角度误差过大而导致切换失败,电机停转。如何能顺利的切换,或者有什么办法可以使rg1.Out到smo1.Theta逐渐趋近,等接近一致时再切换?是否有文档说明?
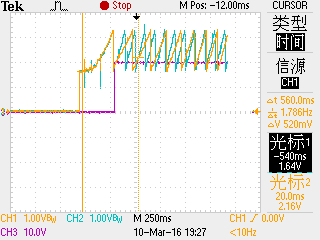
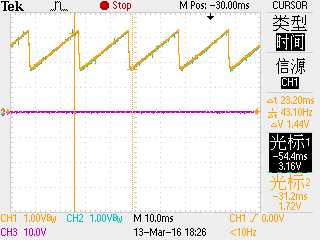
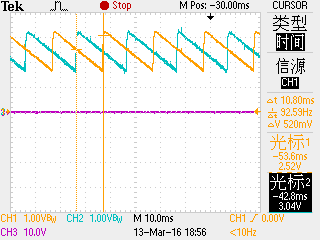
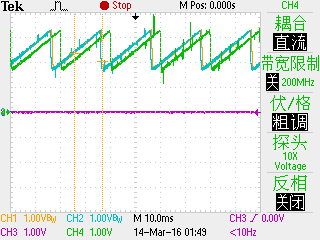
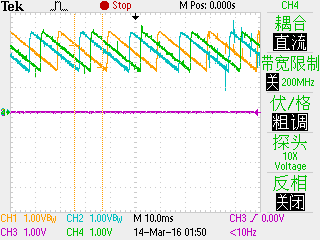
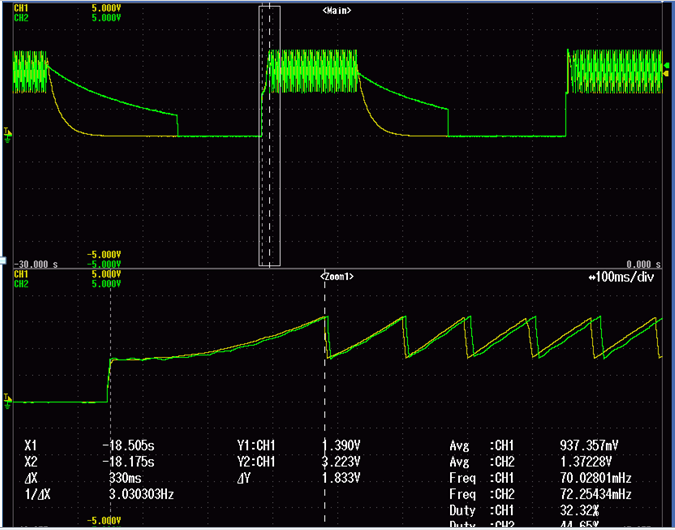 角度差如图:开环角度rg.out(绿色)与估算角度smo.Theta(黄色)
角度差如图:开环角度rg.out(绿色)与估算角度smo.Theta(黄色)