Part Number: TMS320F280039C
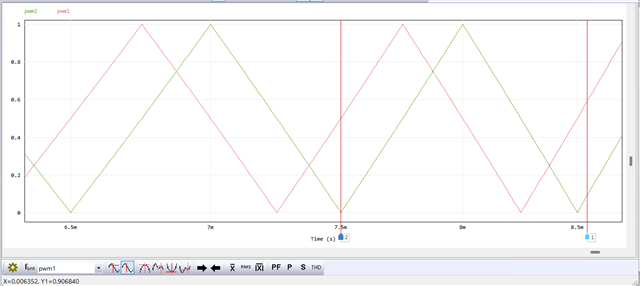
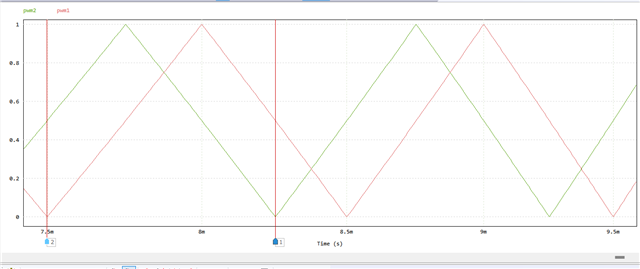
配置描述描述:在项目中使用PWM调频移相,PWM1 与PWM2 ,
①设置PWM2为同步源 ,使用的是 GLDCTL2[OSHTLD]=1 , GLDCTL[GLDMODE]=0,CNT=0输出同步信号;
② PWM2当CNT=0,且GLDCTL2[OSHTLD]=1,全局加载,PWM1 接受到同步信号,并且GLDCTL2[OSHTLD]=1 ,全局加载;
③配置使用adc中断,当PWMCNT==PRD 时产生中断,计算周期和移相角
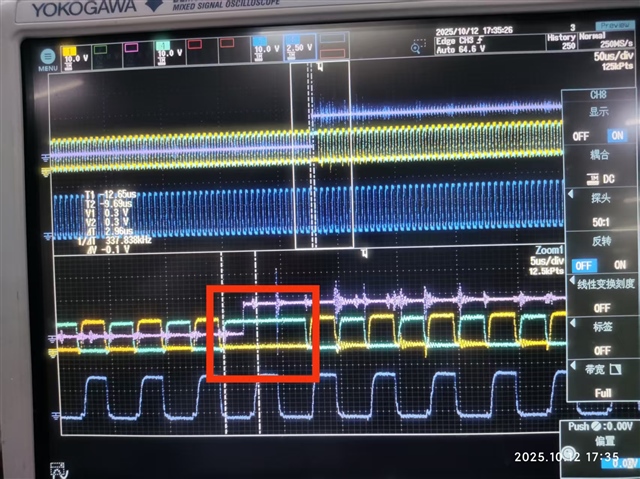
问题描述,当TBPHS从0变为1时,输出电平持续为高,请帮忙分析原因,以及解决方法
pwm配置如下
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; //TBCLK = SYSCLKOUT
EPwm1Regs.TBPRD = SRC_Period_min;
EPwm1Regs.TBPHS.all = 0;
EPwm1Regs.TBCTR = 0x0000;
// Setup TBCLK
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;
EPwm1Regs.TBCTL.bit.PHSEN = TB_ENABLE;
EPwm1Regs.TBCTL.bit.PRDLD = TB_SHADOW;
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
EPwm1Regs.EPWMSYNCINSEL.bit.SEL=SYNC_IN_SRC_SYNCOUT_EPWM2; //ͬ��ԴEPWM2
EPwm1Regs.EPWMXLINK.bit.GLDCTL2LINK=1; //link EPWM2
EPwm1Regs.EPWMXLINK.bit.TBPRDLINK=1; //link EPWM2
EPwm1Regs.GLDCTL.bit.GLD=1;
EPwm1Regs.GLDCTL.bit.GLDMODE=0x3; //ͬ�����ز���ʱ��
EPwm1Regs.GLDCTL.bit.OSHTMODE=1;
EPwm1Regs.GLDCFG.all=0xF; //globle load
// Set actions
EPwm1Regs.AQCTLA.bit.ZRO = AQ_SET;
EPwm1Regs.AQCTLA.bit.PRD = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.ZRO = AQ_SET;
EPwm1Regs.AQCTLB.bit.PRD = AQ_CLEAR;
EPwm1Regs.AQTSRCSEL.bit.T1SEL = 7;
EPwm1Regs.DBCTL.bit.IN_MODE = 2;
EPwm1Regs.DBCTL.bit.POLSEL = 2;
EPwm1Regs.DBCTL.bit.OUT_MODE = 3;
EPwm1Regs.DBFED.bit.DBFED = SRC_Period_min; //12=0.1us*120M
EPwm1Regs.DBRED.bit.DBRED = SRC_Period_min;
EPwm1Regs.AQSFRC.bit.RLDCSF=CC_CTR_PRD; //�������
EPwm1Regs.AQCSFRC.all = 0x09; //force low
//===========================================================================
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; //TBCLK = SYSCLKOUT
EPwm2Regs.TBPRD = SRC_Period_min;
EPwm2Regs.TBPHS.all = 0;
EPwm2Regs.TBCTR = 0x0000;
// Setup TBCLK
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN;
EPwm2Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Master module
EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW;
// EPwm2Regs.TBCTL2.bit.PRDLDSYNC=0x0; //TBPRD���������
EPwm2Regs.EPWMSYNCOUTEN.bit.ZEROEN=1; //ͬ���źŹ�������
EPwm2Regs.TBCTL2.bit.OSHTSYNCMODE=1;
EPwm2Regs.TBCTL3.bit.OSSFRCEN=1;
EPwm2Regs.GLDCTL.bit.GLD=1;
EPwm2Regs.GLDCTL.bit.GLDMODE=0x0; //ͬ������CTR=0;
EPwm2Regs.GLDCTL.bit.OSHTMODE=1;
EPwm2Regs.GLDCFG.all=0xF; //globle load
EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;
EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;
// Set actions
EPwm2Regs.AQCTLA.bit.ZRO = AQ_SET;
EPwm2Regs.AQCTLA.bit.PRD = AQ_CLEAR;
EPwm2Regs.AQCTLB.bit.ZRO = AQ_SET;
EPwm2Regs.AQCTLB.bit.PRD = AQ_CLEAR;
EPwm2Regs.DBCTL.bit.IN_MODE = 2;
EPwm2Regs.DBCTL.bit.POLSEL = 2;
EPwm2Regs.DBCTL.bit.OUT_MODE = 3;
EPwm2Regs.DBFED.bit.DBFED = SRC_Period_min; //12=0.1us*120M
EPwm2Regs.DBRED.bit.DBRED = SRC_Period_min;
EPwm2Regs.AQSFRC.bit.RLDCSF=CC_CTR_PRD; //�������
EPwm2Regs.AQCSFRC.all = 0x09; //force low
中断程序
interrupt void adc_isr(void)
{
if(LastTheta >=0.0f && PWM_Theta <0.0f) //��λ���0��ʱ��Ҫ��T1�¼���ֹ����ߵ�ƽ
{
EPwm1Regs.AQCTLA2.bit.T1U = 0;
EPwm1Regs.AQCTLB2.bit.T1U = 0;
EPwm1Regs.AQCTLA2.bit.T1D = 2;
EPwm1Regs.AQCTLB2.bit.T1D = 2;
}
else if(LastTheta <0.0f && PWM_Theta >=0.0f)
{
EPwm1Regs.AQCTLA2.bit.T1U = 1;
EPwm1Regs.AQCTLB2.bit.T1U = 1;
EPwm1Regs.AQCTLA2.bit.T1D = 0;
EPwm1Regs.AQCTLB2.bit.T1D = 0;
}
else
{
EPwm1Regs.AQCTLA2.bit.T1U = 0;
EPwm1Regs.AQCTLB2.bit.T1U = 0;
EPwm1Regs.AQCTLA2.bit.T1D = 0;
EPwm1Regs.AQCTLB2.bit.T1D = 0;
}
if(PWM_Theta <= 0.0f) //�����ͺ�ԭ�ߣ���طŵ�
{
EPwm1Regs.TBCTL.bit.PHSDIR = TB_UP; //����
EPwm1Regs.TBPHS.bit.TBPHS = (-PWM_Theta)*SRC_Period;
}
else //���߳�ǰԭ�� ��س��
{
EPwm1Regs.TBCTL.bit.PHSDIR = TB_DOWN; //�½�
EPwm1Regs.TBPHS.bit.TBPHS = PWM_Theta*SRC_Period;
}
EPwm2Regs.TBPRD = SRC_Period;
EPwm2Regs.GLDCTL2.bit.OSHTLD = 1;
LastTheta=PWM_Theta;
}
AdcaRegs.ADCINTFLGCLR.bit.ADCINT1 = 1;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
}
驱动1A1B异常