关于过调制问题,有几个疑惑:
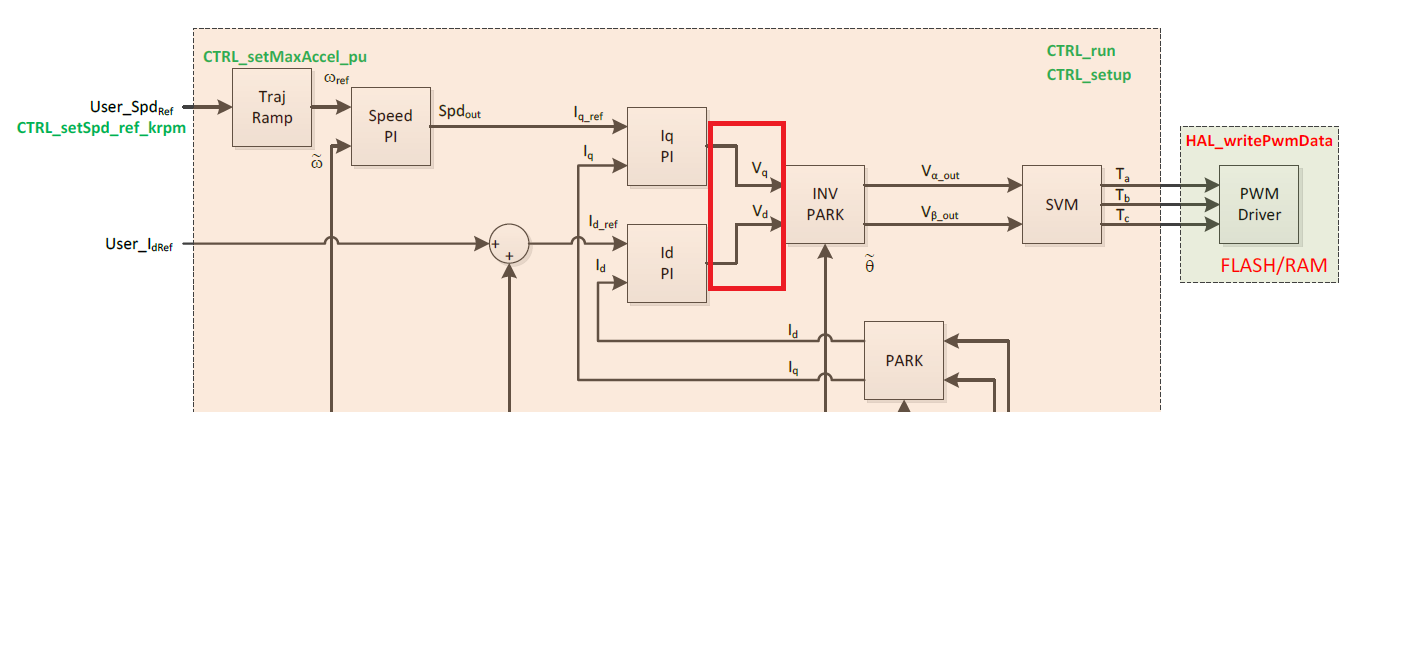
1、Ti的基本例程里面,是以Udc/sqrt(3)作为电压基准值,在计算向量作用时间的时候,没有看到相关过调制算法。
问题:Ti的算法是本身不需要过调制,还是就没有加入过调制算法?
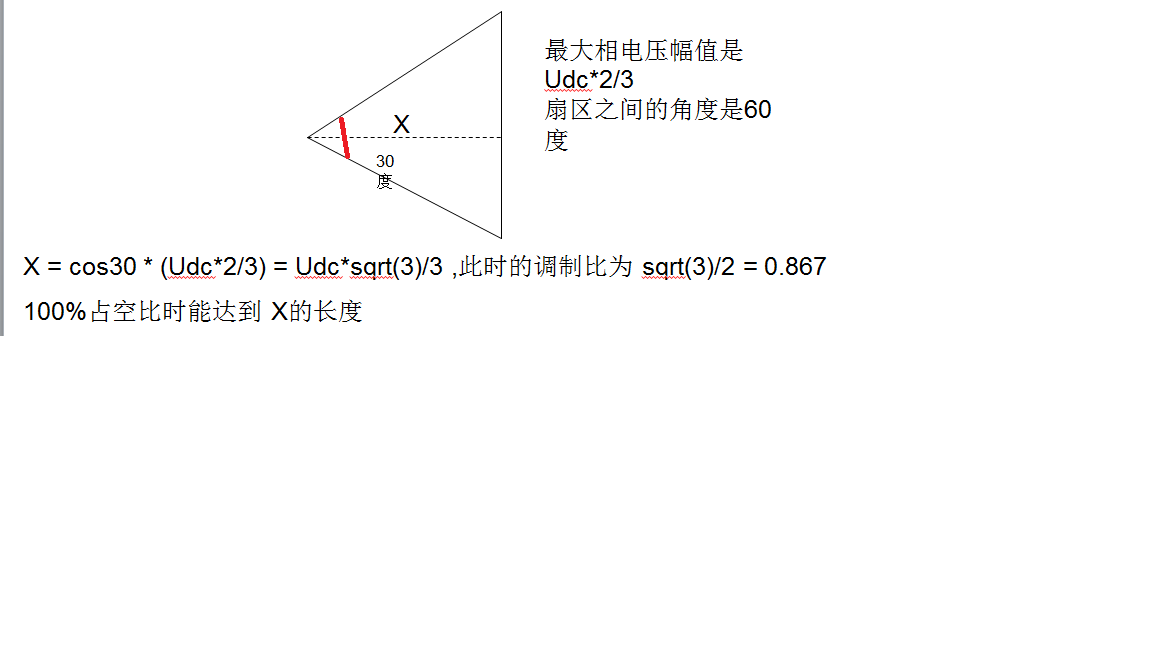
2.在一些文献中看到的过调制算法中,有的文献提到“六步阶波输出的相电压基波峰值是(2/pi)*Udc”。
问题:这里的(2/pi)*Udc是怎么计算的,没有搞明白。
3.将电压基准值修改为Udc的时候,加入过调制,可以提高电机最高速度,但是电机噪声很大。
问题:噪声是因为什么原因?
为什么电压基准值修改为Udc的时候可以提高速度?这样做好不?
问题有点多,就一次性列出了,有知道的请不吝赐教,非常感谢