

InstaSPIN-foc的28027f的例程中user.h
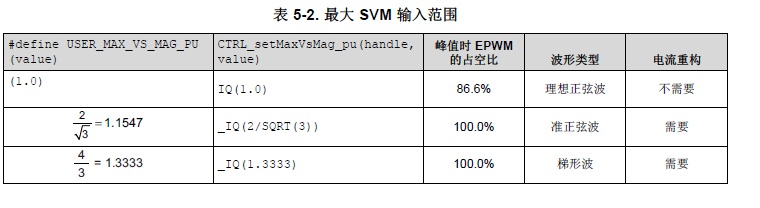
#define USER_MAX_VS_MAG_PU (0.5) // Set to 0.5 if a current reconstruction technique is not used. Look at the module svgen_current in lab10a-x for more info.
而InstaSPIN-foc用户手册中,#define USER_MAX_VS_MAG_PU (1.0)
这是什么原因?
InstaSPIN-foc的28027f的例程中user.h
#define USER_MAX_VS_MAG_PU (0.5) // Set to 0.5 if a current reconstruction technique is not used. Look at the module svgen_current in lab10a-x for more info.
而InstaSPIN-foc用户手册中,#define USER_MAX_VS_MAG_PU (1.0)
这是什么原因?
