If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
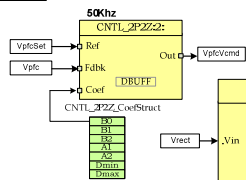
The 2-pole 2-zero control block implements a second order control law using an IIR filter structure with programmable output saturation. This type of controller requires two delay lines: one for input data and one for output data, each consisting of two elements. The discrete transfer function for the basic 2P2Z control law is… This may be expressed in difference equation form as: u(n) a1u(n1) a2u(n 2)b0e(n)b1e(n1)b2e(n 2)

 有没有技术手册?原理,和使用方法/ 谢谢!
有没有技术手册?原理,和使用方法/ 谢谢!

