

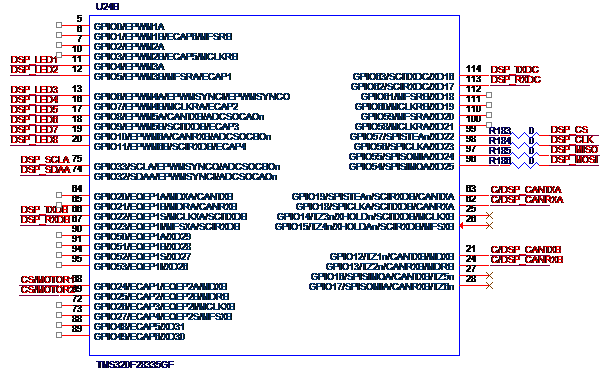
自制的板子28335 CAN接口原理如图所示,A路使用引脚GPIO18和GPIO19,B路使用引脚GPIO12和GPIO13,在端口处将CANA+和CANB+相连,CANA-和CANB-相连,并在CANA+和CANA-之间并联120欧的电阻,调试附件工程,即A路发送0X55555555和0XAAAAAAAA,B路接收,发现异常描述如下:
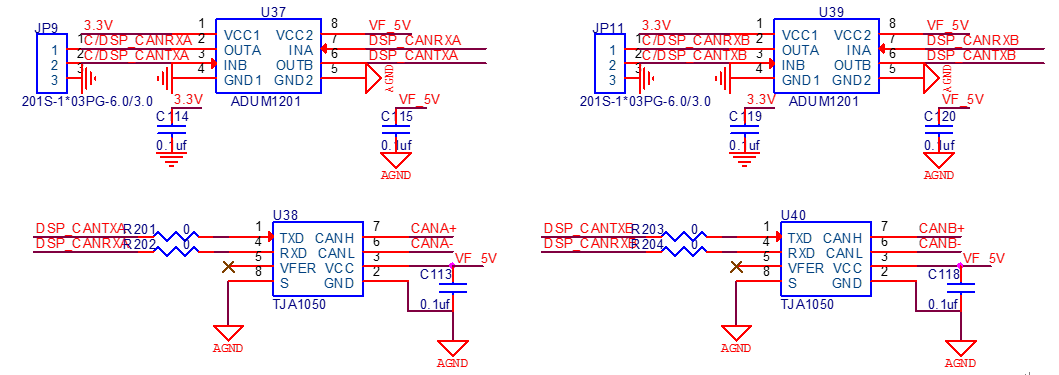
1、 该工程在开发板上测试正常,在开发板上测试TXD波形如图
2、 自制板子的串口和指示灯等功能都正常,仿真器的连接正常
3、 自制的板子和开发板的CANA和CANB接口引脚相同,但是自制的板子CAN接口异常,具体表现在A路TA无法置位
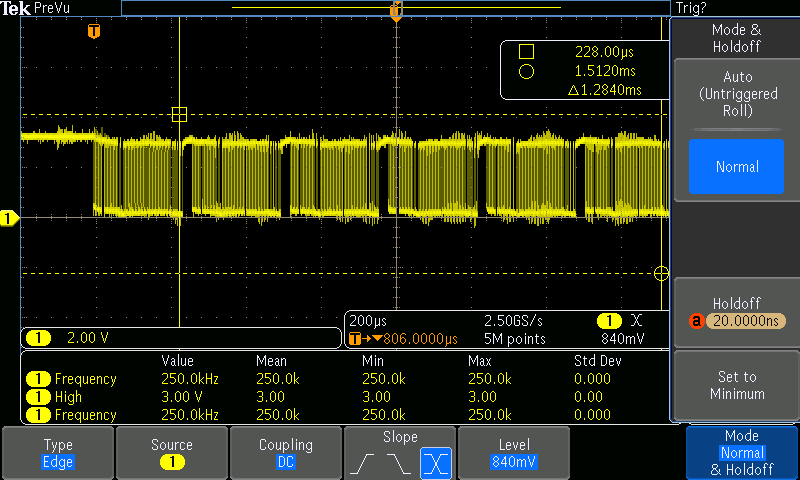
4、 直接测量A路TXD波形,约每隔3.8ms有一次宽度约2us的低电平,波形如图所示:
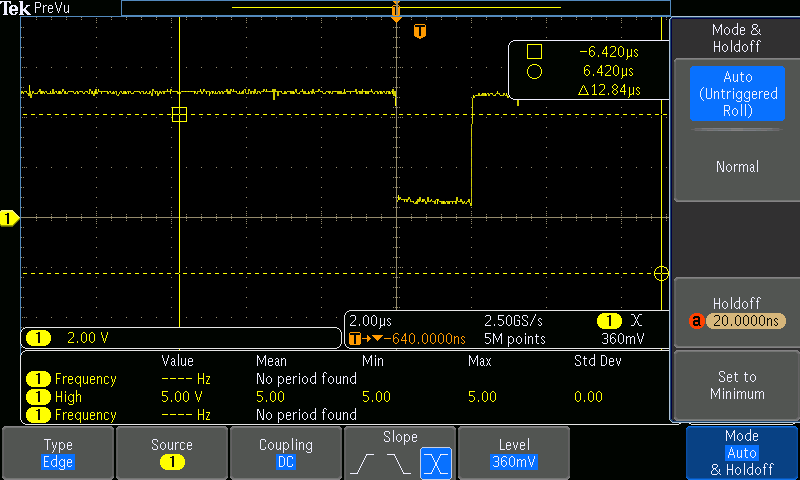
5、 尝试改成B发送,测量B路TXD的波形和上面波形一致,尝试将A路CAN用GPIO30和GPIO31,现象一样
6、 比较开发板和自制板子区别,发现芯片丝印不同,开发板上的芯片批次号是CA,而自制板子芯片批次号是G4A,如图所示:


请问一下自制板子CAN不行是怎么回事?
// TI File $Revision: /main/8 $
// Checkin $Date: August 10, 2007 09:04:22 $
//###########################################################################
// Filename: Example_28xEcan_A_to_B_Xmit.c
//
// Description: eCAN-A To eCAN-B TXLOOP - Transmit loop
//
// ASSUMPTIONS:
//
// This program requires the DSP2833x header files.
//
// Both CAN ports of the 2833x DSP need to be connected
// to each other (via CAN transceivers)
//
// eCANA is on GPIO19(CANTXA) and
// GPIO18 (CANRXA)
//
// eCANB is on GPIO20 (CANTXB) and
// GPIO21 (CANRXB)
//
// As supplied, this project is configured for "boot to SARAM"
// operation. The 2833x Boot Mode table is shown below.
// For information on configuring the boot mode of an eZdsp,
// please refer to the documentation included with the eZdsp,
//
// $Boot_Table:
//
// GPIO87 GPIO86 GPIO85 GPIO84
// XA15 XA14 XA13 XA12
// PU PU PU PU
// ==========================================
// 1 1 1 1 Jump to Flash
// 1 1 1 0 SCI-A boot
// 1 1 0 1 SPI-A boot
// 1 1 0 0 I2C-A boot
// 1 0 1 1 eCAN-A boot
// 1 0 1 0 McBSP-A boot
// 1 0 0 1 Jump to XINTF x16
// 1 0 0 0 Jump to XINTF x32
// 0 1 1 1 Jump to OTP
// 0 1 1 0 Parallel GPIO I/O boot
// 0 1 0 1 Parallel XINTF boot
// 0 1 0 0 Jump to SARAM <- "boot to SARAM"
// 0 0 1 1 Branch to check boot mode
// 0 0 1 0 Boot to flash, bypass ADC cal
// 0 0 0 1 Boot to SARAM, bypass ADC cal
// 0 0 0 0 Boot to SCI-A, bypass ADC cal
// Boot_Table_End$
//
// DESCRIPTION:
//
// This example TRANSMITS data to another CAN module using MAILBOX5
// This program could either loop forever or transmit "n" # of times,
// where "n" is the TXCOUNT value.
//
// This example can be used to check CAN-A and CAN-B. Since CAN-B is
// initialized in DSP2833x_ECan.c, it will acknowledge all frames
// transmitted by the node on which this code runs. Both CAN ports of
// the 2833x DSP need to be connected to each other (via CAN transceivers)
//
//###########################################################################
// Original Author: HJ
//
// $TI Release: DSP2833x Header Files V1.10 $
// $Release Date: February 15, 2008 $
//###########################################################################
#include "DSP2833x_Device.h" // DSP2833x Headerfile Include File
#include "DSP2833x_Examples.h" // DSP2833x Examples Include File
#define TXCOUNT 100 // Transmission will take place (TXCOUNT) times..
#define LED1 GpioDataRegs.GPATOGGLE.bit.GPIO4
#define LED2 GpioDataRegs.GPATOGGLE.bit.GPIO5
#define LED3 GpioDataRegs.GPATOGGLE.bit.GPIO6
#define LED4 GpioDataRegs.GPATOGGLE.bit.GPIO7
// Globals for this example
long i,j;
long loopcount = 0;
volatile struct MBOX *Mailbox;
Uint32 ErrorCount;
Uint32 PassCount;
Uint32 MessageReceivedCount;
Uint32 TestMbox1 = 0;
Uint32 TestMbox2 = 0;
Uint32 TestMbox3 = 0;
void mailbox_check(int32 T1, int32 T2, int32 T3)
{
if((T1 !=0x55555555 ) || ( T2 != 0xAAAAAAAA)|| ( T3 != 0x95555555))
{
ErrorCount++;
}
else
{
PassCount++;
}
}
void main()
{
/* Create a shadow register structure for the CAN control registers. This is
needed, since, only 32-bit access is allowed to these registers. 16-bit access
to these registers could potentially corrupt the register contents. This is
especially true while writing to a bit (or group of bits) among bits 16 - 31 */
struct ECAN_REGS ECanaShadow;
struct ECAN_REGS ECanbShadow;
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the DSP2833x_SysCtrl.c file.
InitSysCtrl();
EALLOW;
GpioCtrlRegs.GPAMUX1.bit.GPIO4 = 0;
GpioCtrlRegs.GPADIR.bit.GPIO4 = 1;
GpioCtrlRegs.GPAMUX1.bit.GPIO5 = 0;
GpioCtrlRegs.GPADIR.bit.GPIO5 = 1;
GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 0;
GpioCtrlRegs.GPADIR.bit.GPIO6 = 1;
GpioCtrlRegs.GPAMUX1.bit.GPIO7 = 0;
GpioCtrlRegs.GPADIR.bit.GPIO7 = 1;
EDIS;
// Step 2. Initalize GPIO:
// This example function is found in the DSP2833x_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
// InitGpio(); // Skipped for this example
// Just initalize eCAN pins for this example
// This function is in DSP2833x_ECan.c
InitECanGpio();
// Step 3. Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
DINT;
// Initialize the PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the DSP2833x_PieCtrl.c file.
InitPieCtrl();
// Disable CPU interrupts and clear all CPU interrupt flags:
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in DSP2833x_DefaultIsr.c.
// This function is found in DSP2833x_PieVect.c.
InitPieVectTable();
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this file.
// No interrupts used in this example.
// Step 4. Initialize all the Device Peripherals:
// This function is found in DSP2833x_InitPeripherals.c
// InitPeripherals(); // Not required for this example
// In this case just initalize eCAN-A and eCAN-B
// This function is in DSP2833x_ECan.c
InitECan();
ErrorCount = 0;
PassCount = 0;
// Step 5. User specific code:
/* Write to the MSGID field */
ECanaMboxes.MBOX10.MSGID.all = 0x95555555; // Extended Identifier
ECanbMboxes.MBOX10.MSGID.all = 0x95555555; // Extended Identifier
/* Configure Mailbox under test as a Transmit mailbox */
ECanaShadow.CANMD.all = ECanaRegs.CANMD.all;
ECanaShadow.CANMD.bit.MD10 = 0;
ECanaRegs.CANMD.all = ECanaShadow.CANMD.all;
ECanbShadow.CANMD.all = ECanbRegs.CANMD.all;
ECanbShadow.CANMD.bit.MD10 = 1;
ECanbRegs.CANMD.all = ECanbShadow.CANMD.all;
/* Enable Mailbox under test */
ECanaShadow.CANME.all = ECanaRegs.CANME.all;
ECanaShadow.CANME.bit.ME10 = 1;
ECanaRegs.CANME.all = ECanaShadow.CANME.all;
ECanbShadow.CANME.all = ECanbRegs.CANME.all;
ECanbShadow.CANME.bit.ME10 = 1;
ECanbRegs.CANME.all = ECanbShadow.CANME.all;
/* Write to DLC field in Master Control reg */
ECanaMboxes.MBOX10.MSGCTRL.bit.DLC = 8;
/* Write to the mailbox RAM field */
ECanaMboxes.MBOX10.MDL.all = 0x55555555;
ECanaMboxes.MBOX10.MDH.all = 0xAAAAAAAA;
ECanbMboxes.MBOX10.MSGCTRL.bit.DLC = 8;
/* Write to the mailbox RAM field */
ECanbMboxes.MBOX10.MDL.all = 0x55555555;
ECanbMboxes.MBOX10.MDH.all = 0xAAAAAAAA;
/* Begin transmitting */
for(i=0; i < TXCOUNT; i++)
{
ECanaShadow.CANTRS.all = 0;
ECanaShadow.CANTRS.bit.TRS10 = 1; // Set TRS for mailbox under test
ECanaRegs.CANTRS.all = ECanaShadow.CANTRS.all;
do
{
ECanaShadow.CANTA.all = ECanaRegs.CANTA.all;
} while(ECanaShadow.CANTA.bit.TA10 == 0 ); // Wait for TA5 bit to be set..//如果线没有连接,如果线连接错误
ECanaShadow.CANTA.all = 0;
ECanaShadow.CANTA.bit.TA10 = 1; // Clear TA5
ECanaRegs.CANTA.all = ECanaShadow.CANTA.all;
Mailbox = &ECanbMboxes.MBOX0 + 25; //CANB读数据
TestMbox1 = Mailbox->MDL.all; // = 0x (n is the MBX number)
TestMbox2 = Mailbox->MDH.all; // = 0x (a constant)
TestMbox3 = Mailbox->MSGID.all;// = 0x (n is the MBX number)
mailbox_check(TestMbox1,TestMbox2,TestMbox3); // Checks the received data
loopcount ++;
}
if(ErrorCount == 0)
{
asm(" ESTOP0"); // OK,数据校验正确
}
else
{
asm(" ESTOP0"); // ERROR,
}
//asm(" ESTOP0"); // Stop here
}
