使用CMPSS和EPWM实现三相正弦的限流,在开发板上用DAC输出测试。
DACA-A3-CMPSS1-EPWM1
DACB-B3-CMPSS3-EPWM2
组合触发:TRIP4、TRIP7-DCxH,TRIP5、TRIP8-DCxL。
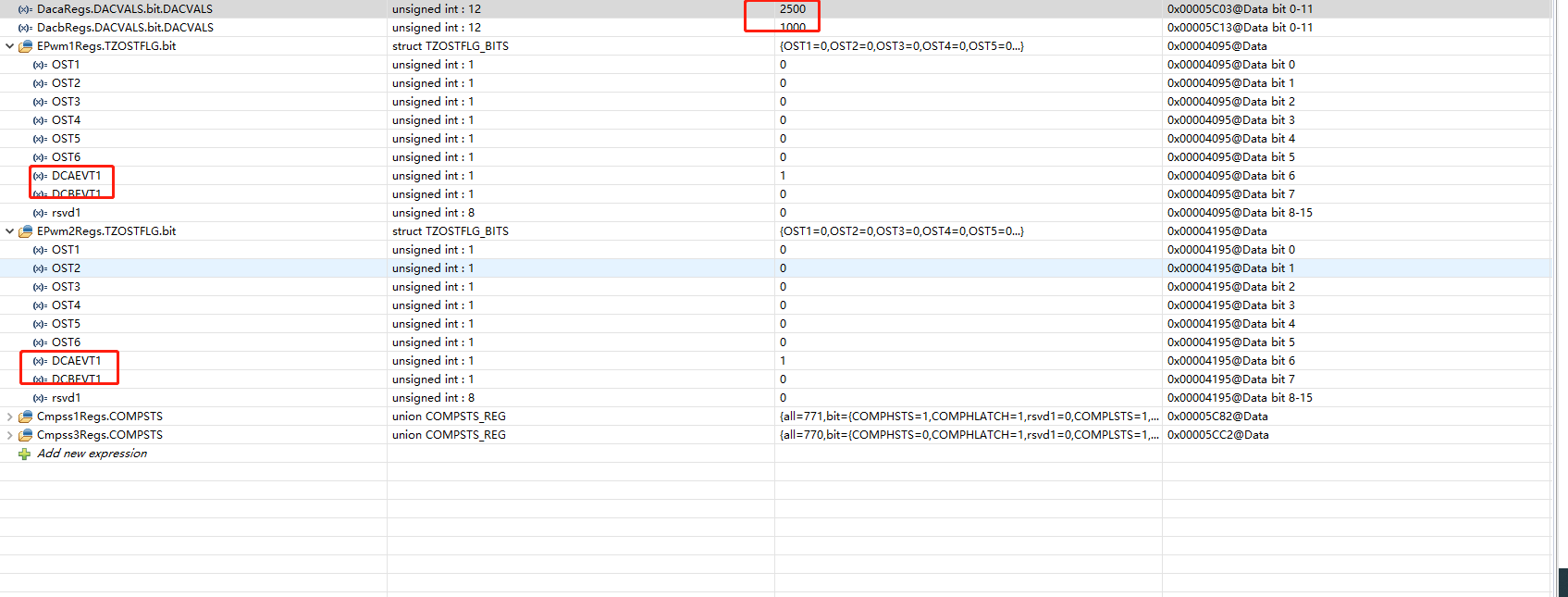
当任一CMPSS输入大于超过CMPxH DAC设定值时能够触发DCAEVT1,EPWM1、EPWM2都停止。
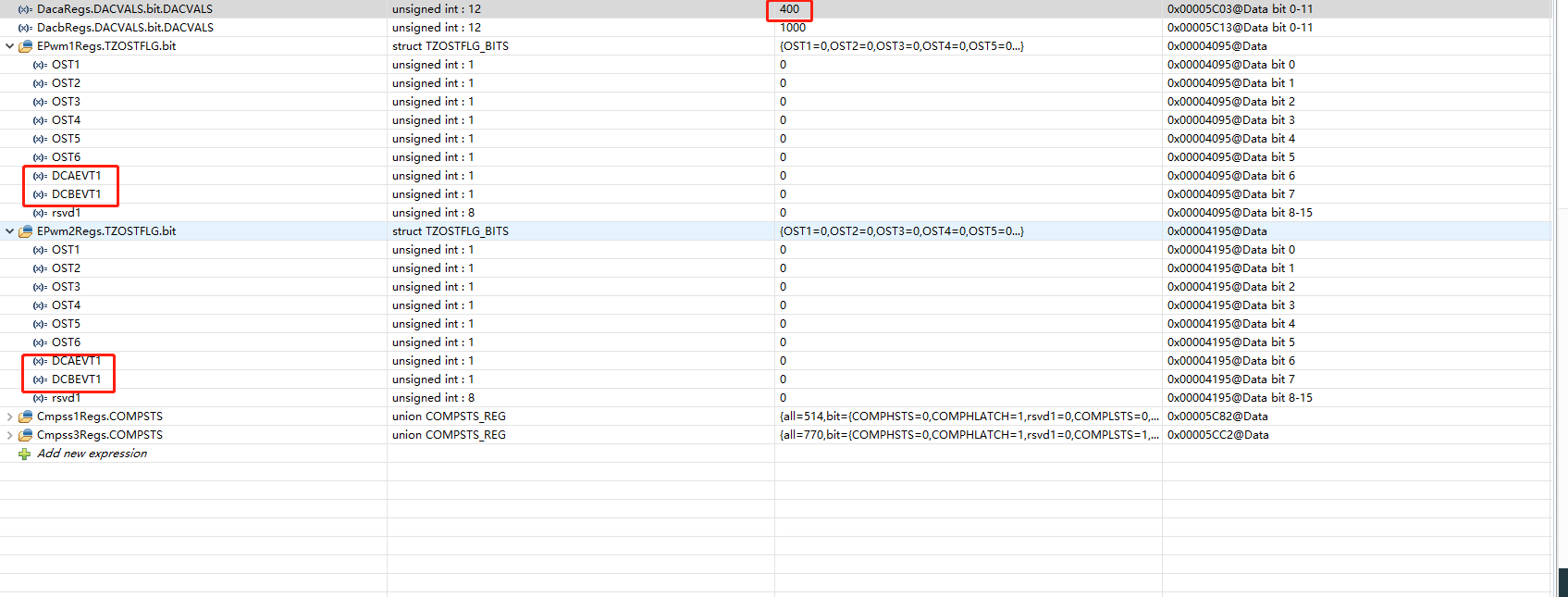
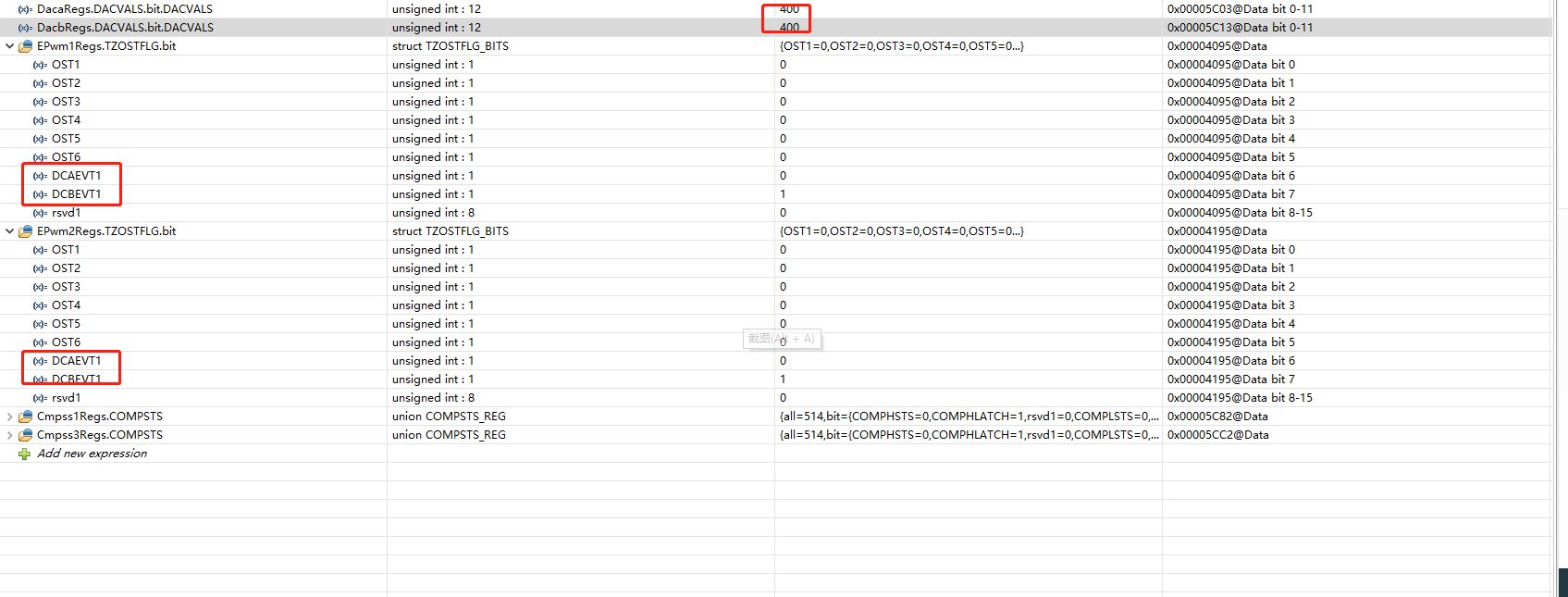
但当一CMPSS输入小于CMPxL DAC设定值时并不能触发DCBEVT1,当2个CMPSS输入小于CMPxL设定值时才能触发DCBEVT1,如何纠正?
以下是代码实现:
/*
* app.c
*
* Created on: 20190829
* Author: Administrator
*/
#include "monitor/monitor.h"
#include <f28004x_device.h>
#include <device.h>
#include <driverlib.h>
#include <math.h>
#define PI 3.141592654f
__interrupt void TIM2_IntHandler(void);
__interrupt void CANA0_IntHandler(void);
__interrupt void ADCA1_IntHandler(void);
void TIM2Init(uint32_t freq_hz);
void CANAInit(void);
void PWMInit(uint32_t freq);
void ADCInit(void);
void DACInit(void);
void ASysCtlInit(void); // 模拟子系统初始化
void CMPSSInit(void);
static uint32_t os_time = 0;
void main(void)
{
Device_init();
Device_initGPIO();
// LED
GPIO_setPinConfig(GPIO_34_GPIO34);
GPIO_setDirectionMode(34u, GPIO_DIR_MODE_OUT);
GPIO_setAnalogMode(23u, GPIO_ANALOG_DISABLED);
GPIO_setPinConfig(GPIO_23_GPIO23);
GPIO_setDirectionMode(23u, GPIO_DIR_MODE_OUT);
// CANB
GPIO_setPinConfig(GPIO_32_CANTXA);
GPIO_setPinConfig(GPIO_33_CANRXA);
// PWM
GPIO_setPadConfig(0, GPIO_PIN_TYPE_STD);
GPIO_setPinConfig(GPIO_0_EPWM1A);
GPIO_setPadConfig(1, GPIO_PIN_TYPE_STD);
GPIO_setPinConfig(GPIO_1_EPWM1B);
GPIO_setPadConfig(2, GPIO_PIN_TYPE_STD);
GPIO_setPinConfig(GPIO_2_EPWM2A);
GPIO_setPadConfig(3, GPIO_PIN_TYPE_STD);
GPIO_setPinConfig(GPIO_3_EPWM2B);
// INT
Interrupt_initModule();
Interrupt_initVectorTable();
Interrupt_register(INT_ADCA1, ADCA1_IntHandler);
Interrupt_register(INT_TIMER2, &TIM2_IntHandler);
Interrupt_register(INT_CANA0, CANA0_IntHandler);
DACInit();
DAC_setShadowValue(DACA_BASE, 1000U);
DAC_setShadowValue(DACB_BASE, 1000U);
TIM2Init(1000u); // 1kHz
CANAInit(); // 1Mbps
ADCInit();
ASysCtlInit();
CMPSSInit();
PWMInit(10000u); // 10kHz
MonitorInit(); //
DEVICE_DELAY_US(30000);
Interrupt_enable(INT_ADCA1);
Interrupt_enable(INT_TIMER2);
Interrupt_enable(INT_CANA0);
EINT;
ERTM;
while (1)
{
MonitorRecvMessage();
MonitorSendMessage();
}
}
void TIM2Init(uint32_t freq_hz)
{
uint32_t tmp = 0;
if (0u != freq_hz)
{
tmp = DEVICE_SYSCLK_FREQ / freq_hz;
CPUTimer_setPeriod(CPUTIMER2_BASE, tmp);
CPUTimer_setPreScaler(CPUTIMER2_BASE, (uint16_t)CPUTIMER_CLOCK_PRESCALER_1);
CPUTimer_stopTimer(CPUTIMER2_BASE);
CPUTimer_reloadTimerCounter(CPUTIMER2_BASE);
CPUTimer_enableInterrupt(CPUTIMER2_BASE);
CPUTimer_startTimer(CPUTIMER2_BASE);
}
}
__interrupt void TIM2_IntHandler(void)
{
float ch0_val = 0.f;
float ch1_val = 0.f;
float ch2_val = 0.f;
float ch3_val = 0.f;
float ch4_val = 0.f;
static float tmp = 0.f;
static int32_t timestamp = 0;
/********** 中断嵌套 使电机ADC中断成为最高优先级 ******************************/
IER |= 0x0001u;
IER &= 0x0001u;
PieCtrlRegs.PIEIER1.all &= 0x0001u;
PieCtrlRegs.PIEACK.all = 0xFFFFu;
asm(" NOP");
EINT;
/********** 中断嵌套 使电机ADC中断成为最高优先级 ******************************/
os_time++;
ch0_val = 1000.f;
ch1_val = 1000.f * sinf(tmp);
ch2_val = 1000.f * cosf(tmp);
ch3_val = (float)(timestamp % 1000);
ch4_val = -1000.f;
tmp += PI / 500.f;
timestamp++;
MonPushFloat(0u, ch0_val);
MonPushFloat(1u, ch1_val);
MonPushFloat(2u, ch2_val);
MonPushFloat(3u, ch3_val);
MonPushFloat(4u, ch4_val);
// if (0u == os_time % 500u)
// {
// GPIO_togglePin(34u);
// }
/********** 中断嵌套 使电机ADC中断成为最高优先级 ******************************/
DINT;
/********** 中断嵌套 使电机ADC中断成为最高优先级 ******************************/
}
uint32_t OSTimeGet(void)
{
uint32_t ret = 0;
ret = os_time;
return ret;
}
void CANAInit(void)
{
CAN_initModule(CANA_BASE);
CAN_setBitRate(CANA_BASE, DEVICE_SYSCLK_FREQ, 1000000u, (uint16_t)10u); // 1M bps
CAN_enableInterrupt(CANA_BASE, CAN_INT_IE0 | CAN_INT_ERROR | CAN_INT_STATUS);
CAN_enableGlobalInterrupt(CANA_BASE, CAN_GLOBAL_INT_CANINT0);
BspMonCanMailBoxCfg();
CAN_startModule(CANA_BASE);
}
uint16_t errorFlag = 0;
__interrupt void CANA0_IntHandler(void)
{
uint32_t status;
/********** 中断嵌套 使电机ADC中断成为最高优先级 ******************************/
uint16_t temp_PIEIER;
temp_PIEIER = PieCtrlRegs.PIEIER9.all;
IER |= 0x0001u;
IER &= 0x0001u;
PieCtrlRegs.PIEIER1.all &= 0x0001u;
PieCtrlRegs.PIEACK.all = 0xFFFFu;
asm(" NOP");
EINT;
/********** 中断嵌套 使电机ADC中断成为最高优先级 ******************************/
status = CAN_getInterruptCause(CANA_BASE);
if(status == CAN_INT_INT0ID_STATUS)
{
status = CAN_getStatus(CANA_BASE);
if(((status & ~(CAN_STATUS_TXOK | CAN_STATUS_RXOK)) != 7u) &&
((status & ~(CAN_STATUS_TXOK | CAN_STATUS_RXOK)) != 0u))
{
// Set a flag to indicate some errors may have occurred.
errorFlag = 1;
}
}
else if(status == MON_CAN_TX_MSG_OBJ_ID)
{
CAN_clearInterruptStatus(CANA_BASE, MON_CAN_TX_MSG_OBJ_ID);
BspMonCanTxCallBack();
}
else if(status == MON_CAN_RX_MSG_OBJ_ID)
{
CAN_clearInterruptStatus(CANA_BASE, MON_CAN_RX_MSG_OBJ_ID);
BspMonCanRxCallBack();
}
else
{
// Spurious interrupt handling can go here.
errorFlag = 1;
}
CAN_clearGlobalInterruptStatus(CANA_BASE, CAN_GLOBAL_INT_CANINT0);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP9);
/********** 中断嵌套 使电机ADC中断成为最高优先级 ******************************/
DINT;
PieCtrlRegs.PIEIER9.all = temp_PIEIER;
/********** 中断嵌套 使电机ADC中断成为最高优先级 ******************************/
}
void PWMInit(uint32_t freq)
{
SysCtl_disablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC);
// cmpss link to epwm trip
XBAR_setEPWMMuxConfig(XBAR_TRIP4, XBAR_EPWM_MUX00_CMPSS1_CTRIPH);
XBAR_enableEPWMMux(XBAR_TRIP4, XBAR_MUX00);
XBAR_setEPWMMuxConfig(XBAR_TRIP5, XBAR_EPWM_MUX01_CMPSS1_CTRIPL);
// XBAR_invertEPWMSignal(XBAR_TRIP5, true);
XBAR_enableEPWMMux(XBAR_TRIP5, XBAR_MUX01);
XBAR_setEPWMMuxConfig(XBAR_TRIP7, XBAR_EPWM_MUX04_CMPSS3_CTRIPH);
XBAR_enableEPWMMux(XBAR_TRIP7, XBAR_MUX04);
XBAR_setEPWMMuxConfig(XBAR_TRIP8, XBAR_EPWM_MUX05_CMPSS3_CTRIPL);
// XBAR_invertEPWMSignal(XBAR_TRIP8, true);
XBAR_enableEPWMMux(XBAR_TRIP8, XBAR_MUX05);
// -------------------------------------------------- PWM1 ------------------------------------------------- //
EPWM_enableDigitalCompareTripCombinationInput(EPWM1_BASE, EPWM_DC_COMBINATIONAL_TRIPIN4
| EPWM_DC_COMBINATIONAL_TRIPIN7, EPWM_DC_TYPE_DCAH);
EPWM_enableDigitalCompareTripCombinationInput(EPWM1_BASE, EPWM_DC_COMBINATIONAL_TRIPIN5
| EPWM_DC_COMBINATIONAL_TRIPIN8, EPWM_DC_TYPE_DCBL);
EPWM_setTripZoneDigitalCompareEventCondition(EPWM1_BASE, EPWM_TZ_DC_OUTPUT_A1, EPWM_TZ_EVENT_DCXH_HIGH);
EPWM_setTripZoneDigitalCompareEventCondition(EPWM1_BASE, EPWM_TZ_DC_OUTPUT_B1, EPWM_TZ_EVENT_DCXL_LOW);
EPWM_setDigitalCompareEventSource(EPWM1_BASE, EPWM_DC_MODULE_A, EPWM_DC_EVENT_1, EPWM_DC_EVENT_SOURCE_ORIG_SIGNAL);
EPWM_setDigitalCompareEventSource(EPWM1_BASE, EPWM_DC_MODULE_B, EPWM_DC_EVENT_1, EPWM_DC_EVENT_SOURCE_ORIG_SIGNAL);
EPWM_setDigitalCompareEventSyncMode(EPWM1_BASE, EPWM_DC_MODULE_A, EPWM_DC_EVENT_1, EPWM_DC_EVENT_INPUT_NOT_SYNCED);
EPWM_setDigitalCompareEventSyncMode(EPWM1_BASE, EPWM_DC_MODULE_B, EPWM_DC_EVENT_1, EPWM_DC_EVENT_INPUT_NOT_SYNCED);
EPWM_setTripZoneAction(EPWM1_BASE, EPWM_TZ_ACTION_EVENT_TZA, EPWM_TZ_ACTION_LOW);
EPWM_setTripZoneAction(EPWM1_BASE, EPWM_TZ_ACTION_EVENT_TZB, EPWM_TZ_ACTION_LOW);
EPWM_enableTripZoneSignals(EPWM1_BASE, EPWM_TZ_SIGNAL_DCAEVT1 | EPWM_TZ_SIGNAL_DCBEVT1);
// Set-up TBCLK
EPWM_setTimeBasePeriod(EPWM1_BASE, DEVICE_SYSCLK_FREQ / (freq * 2u));
EPWM_setPhaseShift(EPWM1_BASE, 0U);
EPWM_setTimeBaseCounter(EPWM1_BASE, 0U);
EPWM_enableADCTrigger(EPWM1_BASE, EPWM_SOC_A);
EPWM_setADCTriggerSource(EPWM1_BASE, EPWM_SOC_A, EPWM_SOC_TBCTR_ZERO);
EPWM_setADCTriggerEventPrescale(EPWM1_BASE, EPWM_SOC_A, 1U);
// Set up counter mode
EPWM_setTimeBaseCounterMode(EPWM1_BASE, EPWM_COUNTER_MODE_UP_DOWN);
EPWM_disablePhaseShiftLoad(EPWM1_BASE);
EPWM_setClockPrescaler(EPWM1_BASE, EPWM_CLOCK_DIVIDER_1, EPWM_HSCLOCK_DIVIDER_1);
// Set up shadowing
EPWM_setCounterCompareShadowLoadMode(EPWM1_BASE, EPWM_COUNTER_COMPARE_A, EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setCounterCompareShadowLoadMode(EPWM1_BASE, EPWM_COUNTER_COMPARE_B, EPWM_COMP_LOAD_ON_CNTR_ZERO);
// Set Compare values
EPWM_setCounterCompareValue(EPWM1_BASE, EPWM_COUNTER_COMPARE_A, 2500u);
EPWM_setCounterCompareValue(EPWM1_BASE, EPWM_COUNTER_COMPARE_B, 2500u);
// Set actions
EPWM_setActionQualifierAction(EPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPA);
EPWM_setActionQualifierAction(EPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
EPWM_setActionQualifierAction(EPWM1_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPB);
EPWM_setActionQualifierAction(EPWM1_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPB);
// -------------------------------------------------- PWM2 ------------------------------------------------- //
EPWM_enableDigitalCompareTripCombinationInput(EPWM2_BASE, EPWM_DC_COMBINATIONAL_TRIPIN4
| EPWM_DC_COMBINATIONAL_TRIPIN7, EPWM_DC_TYPE_DCAH);
EPWM_enableDigitalCompareTripCombinationInput(EPWM2_BASE, EPWM_DC_COMBINATIONAL_TRIPIN5
| EPWM_DC_COMBINATIONAL_TRIPIN8, EPWM_DC_TYPE_DCBL);
EPWM_setTripZoneDigitalCompareEventCondition(EPWM2_BASE, EPWM_TZ_DC_OUTPUT_A1, EPWM_TZ_EVENT_DCXH_HIGH);
EPWM_setTripZoneDigitalCompareEventCondition(EPWM2_BASE, EPWM_TZ_DC_OUTPUT_B1, EPWM_TZ_EVENT_DCXL_LOW);
EPWM_setDigitalCompareEventSource(EPWM2_BASE, EPWM_DC_MODULE_A, EPWM_DC_EVENT_1, EPWM_DC_EVENT_SOURCE_ORIG_SIGNAL);
EPWM_setDigitalCompareEventSource(EPWM2_BASE, EPWM_DC_MODULE_B, EPWM_DC_EVENT_1, EPWM_DC_EVENT_SOURCE_ORIG_SIGNAL);
EPWM_setDigitalCompareEventSyncMode(EPWM2_BASE, EPWM_DC_MODULE_A, EPWM_DC_EVENT_1, EPWM_DC_EVENT_INPUT_NOT_SYNCED);
EPWM_setDigitalCompareEventSyncMode(EPWM2_BASE, EPWM_DC_MODULE_B, EPWM_DC_EVENT_1, EPWM_DC_EVENT_INPUT_NOT_SYNCED);
EPWM_setTripZoneAction(EPWM2_BASE, EPWM_TZ_ACTION_EVENT_TZA, EPWM_TZ_ACTION_LOW);
EPWM_setTripZoneAction(EPWM2_BASE, EPWM_TZ_ACTION_EVENT_TZB, EPWM_TZ_ACTION_LOW);
EPWM_enableTripZoneSignals(EPWM2_BASE, EPWM_TZ_SIGNAL_DCAEVT1 | EPWM_TZ_SIGNAL_DCBEVT1);
// Set-up TBCLK
EPWM_setTimeBasePeriod(EPWM2_BASE, DEVICE_SYSCLK_FREQ / (freq * 2u));
EPWM_setPhaseShift(EPWM2_BASE, 0U);
EPWM_setTimeBaseCounter(EPWM2_BASE, 0U);
EPWM_enableADCTrigger(EPWM2_BASE, EPWM_SOC_A);
EPWM_setADCTriggerSource(EPWM2_BASE, EPWM_SOC_A, EPWM_SOC_TBCTR_ZERO);
EPWM_setADCTriggerEventPrescale(EPWM2_BASE, EPWM_SOC_A, 1U);
// Set up counter mode
EPWM_setTimeBaseCounterMode(EPWM2_BASE, EPWM_COUNTER_MODE_UP_DOWN);
EPWM_disablePhaseShiftLoad(EPWM2_BASE);
EPWM_setClockPrescaler(EPWM2_BASE, EPWM_CLOCK_DIVIDER_1, EPWM_HSCLOCK_DIVIDER_1);
// Set up shadowing
EPWM_setCounterCompareShadowLoadMode(EPWM2_BASE, EPWM_COUNTER_COMPARE_A, EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setCounterCompareShadowLoadMode(EPWM2_BASE, EPWM_COUNTER_COMPARE_B, EPWM_COMP_LOAD_ON_CNTR_ZERO);
// Set Compare values
EPWM_setCounterCompareValue(EPWM2_BASE, EPWM_COUNTER_COMPARE_A, 2500u);
EPWM_setCounterCompareValue(EPWM2_BASE, EPWM_COUNTER_COMPARE_B, 2500u);
// Set actions
EPWM_setActionQualifierAction(EPWM2_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPA);
EPWM_setActionQualifierAction(EPWM2_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
EPWM_setActionQualifierAction(EPWM2_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPB);
EPWM_setActionQualifierAction(EPWM2_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPB);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC);
// Clear trip flags
EPWM_clearTripZoneFlag(EPWM1_BASE, EPWM_TZ_INTERRUPT | EPWM_TZ_FLAG_OST);
EPWM_clearTripZoneFlag(EPWM2_BASE, EPWM_TZ_INTERRUPT | EPWM_TZ_FLAG_OST);
}
void ASysCtlInit(void)
{
ASysCtl_selectCMPHPMux(ASYSCTL_CMPHPMUX_SELECT_1, 3u); // CMP1HP - A3
ASysCtl_selectCMPLPMux(ASYSCTL_CMPLPMUX_SELECT_1, 3u); // CMP1LP - A3
ASysCtl_selectCMPHPMux(ASYSCTL_CMPHPMUX_SELECT_3, 3u); // CMP3HP - B3
ASysCtl_selectCMPLPMux(ASYSCTL_CMPLPMUX_SELECT_3, 3u); // CMP3LP - B3
}
void DACInit(void)
{
// DACA - CMPSS1
DAC_setGainMode(DACA_BASE, DAC_GAIN_TWO);
DAC_setReferenceVoltage(DACA_BASE, DAC_REF_ADC_VREFHI);
DAC_setLoadMode(DACA_BASE, DAC_LOAD_SYSCLK);
DAC_enableOutput(DACA_BASE);
// DACB - CMPSS3
DAC_setGainMode(DACB_BASE, DAC_GAIN_TWO);
DAC_setReferenceVoltage(DACB_BASE, DAC_REF_ADC_VREFHI);
DAC_setLoadMode(DACB_BASE, DAC_LOAD_SYSCLK);
DAC_enableOutput(DACB_BASE);
}
void CMPSSInit(void)
{
// Enable CMPSS and configure the negative input signal to come from
// the DAC
CMPSS_enableModule(CMPSS1_BASE);
CMPSS_configHighComparator(CMPSS1_BASE, CMPSS_INSRC_DAC);
CMPSS_configLowComparator(CMPSS1_BASE, CMPSS_INSRC_DAC);
// Use VDDA as the reference for the DAC and set DAC value to midpoint for
// arbitrary reference.
CMPSS_configDAC(CMPSS1_BASE, CMPSS_DACREF_VDDA | CMPSS_DACVAL_SYSCLK | CMPSS_DACSRC_SHDW);
CMPSS_setDACValueHigh(CMPSS1_BASE, 2048u);
CMPSS_setDACValueLow(CMPSS1_BASE, 500u);
// Configure the output signals. Both CTRIPH and CTRIPOUTH will be fed by
// the asynchronous comparator output.
CMPSS_configOutputsHigh(CMPSS1_BASE, CMPSS_TRIP_ASYNC_COMP);
CMPSS_configOutputsLow(CMPSS1_BASE, CMPSS_TRIP_ASYNC_COMP);
// Enable CMPSS and configure the negative input signal to come from
// the DAC
CMPSS_enableModule(CMPSS3_BASE);
CMPSS_configHighComparator(CMPSS3_BASE, CMPSS_INSRC_DAC);
CMPSS_configLowComparator(CMPSS3_BASE, CMPSS_INSRC_DAC);
// Use VDDA as the reference for the DAC and set DAC value to midpoint for
// arbitrary reference.
CMPSS_configDAC(CMPSS3_BASE, CMPSS_DACREF_VDDA | CMPSS_DACVAL_SYSCLK | CMPSS_DACSRC_SHDW);
CMPSS_setDACValueHigh(CMPSS3_BASE, 2048u);
CMPSS_setDACValueLow(CMPSS3_BASE, 500u);
// Configure the output signals. Both CTRIPH and CTRIPOUTH will be fed by
// the asynchronous comparator output.
CMPSS_configOutputsHigh(CMPSS3_BASE, CMPSS_TRIP_ASYNC_COMP);
CMPSS_configOutputsLow(CMPSS3_BASE, CMPSS_TRIP_ASYNC_COMP);
}
void ADCInit(void)
{
// Setup VREF as internal
ADC_setVREF(ADCA_BASE, ADC_REFERENCE_INTERNAL, ADC_REFERENCE_3_3V);
ADC_setVREF(ADCB_BASE, ADC_REFERENCE_INTERNAL, ADC_REFERENCE_3_3V);
ADC_setVREF(ADCC_BASE, ADC_REFERENCE_INTERNAL, ADC_REFERENCE_3_3V);
// Set ADCCLK divider to /4
ADC_setPrescaler(ADCA_BASE, ADC_CLK_DIV_4_0);
ADC_setPrescaler(ADCB_BASE, ADC_CLK_DIV_4_0);
ADC_setPrescaler(ADCC_BASE, ADC_CLK_DIV_4_0);
// Set pulse positions to late
ADC_setInterruptPulseMode(ADCA_BASE, ADC_PULSE_END_OF_CONV);
ADC_setInterruptPulseMode(ADCB_BASE, ADC_PULSE_END_OF_CONV);
ADC_setInterruptPulseMode(ADCC_BASE, ADC_PULSE_END_OF_CONV);
// Power up the ADCs and then delay for 1 ms
ADC_enableConverter(ADCA_BASE);
ADC_enableConverter(ADCB_BASE);
ADC_enableConverter(ADCC_BASE);
DEVICE_DELAY_US(1000); // 延时1ms,ADC完成初始化
ADC_setupSOC(ADCA_BASE, ADC_SOC_NUMBER0, ADC_TRIGGER_EPWM1_SOCA, ADC_CH_ADCIN3, 10); // IU - A3
ADC_setupSOC(ADCB_BASE, ADC_SOC_NUMBER0, ADC_TRIGGER_EPWM1_SOCA, ADC_CH_ADCIN3, 10); // IV - B3
// Set SOC1 to set the interrupt 1 flag. Enable the interrupt and make
// sure its flag is cleared.
ADC_setInterruptSource(ADCA_BASE, ADC_INT_NUMBER1, ADC_SOC_NUMBER0);
ADC_enableInterrupt(ADCA_BASE, ADC_INT_NUMBER1);
ADC_clearInterruptStatus(ADCA_BASE, ADC_INT_NUMBER1);
}
__interrupt void ADCA1_IntHandler(void)
{
static uint32_t time_cnt = 0;
DEVICE_DELAY_US(60);
// LED闪烁,显示中断状态
time_cnt++;
if (5000u == time_cnt)
{
time_cnt = 0;
GPIO_togglePin(23u);
}
ADC_clearInterruptStatus(ADCA_BASE, ADC_INT_NUMBER1);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP1);
}
以下是寄存器结果: