我要对外部的EEPROM进行数据的读写,有无范例程式可供参考?
我的DSP是F28035、EEPROM是25LC320A、界面是SPI
DSP与EEPROM的联接关系是
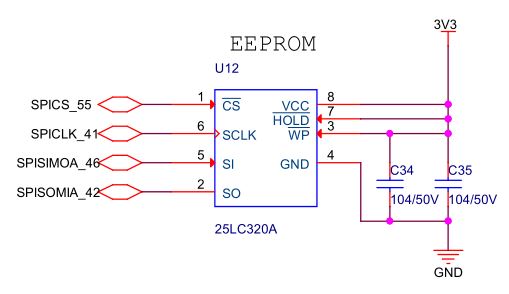
DSP的脚位配置如下


This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
我要对外部的EEPROM进行数据的读写,有无范例程式可供参考?
我的DSP是F28035、EEPROM是25LC320A、界面是SPI
DSP与EEPROM的联接关系是
DSP的脚位配置如下
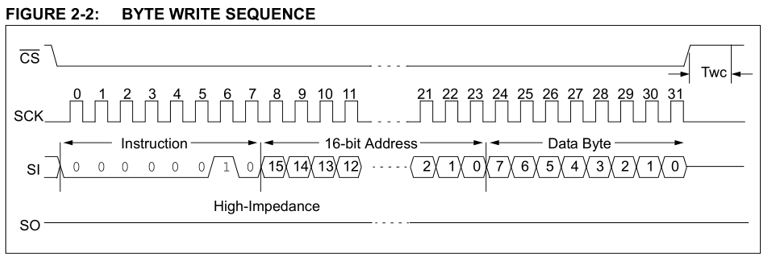
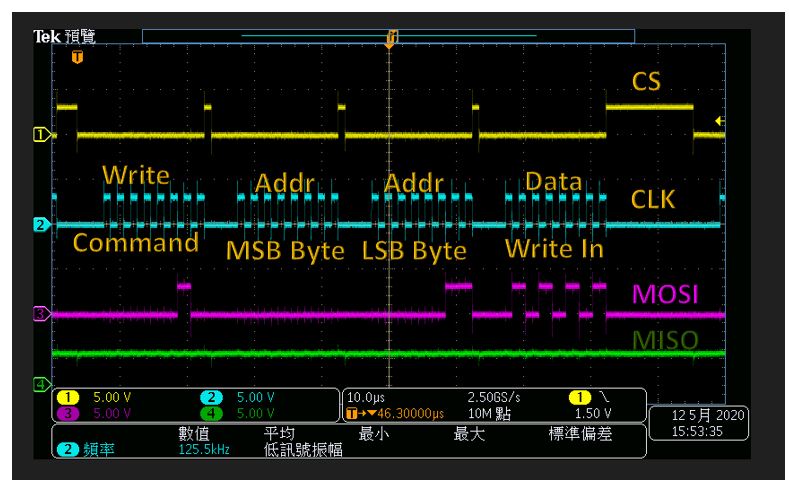
waveform1是写入的波形,感觉上,F28035在数据写入SPITXBUF后不久(有点延迟时间),就下拉CS,将数据发出后,就上拉CS,如此反复。我用的EEPROM是Michochip的25AA320A,它的写入波形式(waveform2),其clock是连续打出,请问是否是我设定的问题,造成F28035的SPI周边的CS是如此表现,(我曾经试图自行下拉CS,但无效果,CS信号还是由SPI周边所控制)
该如何修正?
main program
#include "DSP28x_Project.h" // Device Headerfile and Examples Include File
#include "SI_GUI_Main.h"
void main(void) {
Uint16 eeprom_data = 0x55;
Uint16 eeprom_d1;
Uint16 eeprom_addr = 0x03;
setupDevice(); //will call setup_EEPROM_SPI
read_EEPROM_Status();
while (1){
addrwrite_EEPROM(eeprom_addr,eeprom_data);
eeprom_d1 = addrread_EEPROM(eeprom_addr);
}
}
void Test() {
char Message[9] = "W Grid "; //�dz��ഫ���ֺ�e�q�Ҧ�
IBDC_PowerGeneration = 25 | 0x8000; //MSB�]��1����F�o�q�q 25*0.1kW = 2.5kW
INV_PowerGeneration = 30 | 0x8000; //MSB�]��1����F�o�q�q 30*0.1kW = 3.0kW
PV_PowerGeneration = 50; //�S�����t���F�o�q�q 50*0.1kW = 5.0kW
PVINV_ErrCode = 123; //���~�X�|�H10�i����ܡG123
PVINV_WarningCode = 567; //ĵ�ܽX�|�H10�i����ܡG567
IBDC_ErrCode = 135; //���~�X�|�H10�i����ܡG135
IBDC_WarningCode = 246; //ĵ�ܽX�|�H10�i����ܡG246
Display_Msg(Message);
}
void ErrCode(void){
if (PVINV_ErrCode || IBDC_ErrCode) {//�p�G������o�X���~�X
if (PVINV_ErrCode >= PVINV_ERROR_NUMBER-1) PVINV_ErrCode = PVINV_ERROR_NUMBER-1;
if (IBDC_ErrCode >= IBDC_ERROR_NUMBER-1) IBDC_ErrCode = IBDC_ERROR_NUMBER-1;
LcmF=1;
ErrCounter++;
}
else
while(ErrCounter>=1 & PVINV_ErrCode==0 & IBDC_ErrCode==0){
if(ErrCounter!=0)
LCD_Display(PVINV_ErrorMsg[PVINV_ErrCode], IBDC_ErrorMsg[IBDC_ErrCode]);
if (!bScanKeyTrigger) {KeyEvent = KeyEvent_Shadow; KeyEvent_Shadow = KEYEVENT_NO_EVENT;}
if(KeyEvent==6){
LcmF=0;
ErrCounter=0;
init_SI_GUI();
return;
}
if (KeyEvent != KEYEVENT_NO_EVENT) {bScanKeyTrigger = 1; KeyEvent = KEYEVENT_NO_EVENT;}
}
}
void System_Oper(void){
if(LcmF==1){return;}
//���s����ƥ�A�h��s����ƥ�
if (!bScanKeyTrigger) {KeyEvent = KeyEvent_Shadow; KeyEvent_Shadow = KEYEVENT_NO_EVENT;}
if (ModeSel_Action_F) {
if (KeyEvent != KEYEVENT_NO_EVENT) {//����LMenu_ModeSel_Action()�S���F����F
ModeSel_Action_F = 0; bScanKeyTrigger = 1; KeyEvent = KEYEVENT_NO_EVENT;
} else return;
}
switch (nFuntionIndex) {//���ާ@�G���n�M������ƥ�A���U�|�B�z
case _Menu_EntryPoint_Index: Menu_EntryPoint(); break;
case _Menu_ModeParaSel_Index: Menu_ModeParaSel(); break;
case _Menu_ModeSel_Index: Menu_ModeSel(); break;
case _Menu_ParaSet_Index: Menu_ParaSet(); break;
}
//����ƥ�B�z�����A���s�Ұʫ��䱽�y�òM������ƥ�
if (KeyEvent != KEYEVENT_NO_EVENT) {bScanKeyTrigger = 1; KeyEvent = KEYEVENT_NO_EVENT;}
}
void UpdataLCMs(void){
if(LcmF==1)
LCD_Display(PVINV_ErrorMsg[PVINV_ErrCode], IBDC_ErrorMsg[IBDC_ErrCode]);
else if(LcmF==0){return;}
}
void Display_Msg(char *dispMsg) {
char LCD01[17], LCD02[17];
Uint16 index, remain_Value;
LCD01[16] = LCD02[16] = '\0'; //�]�w�r�굲���Ÿ�
for (index=0; index < 8; index++) LCD01[index] = dispMsg[index]; //�ƻs�B��Ҧ�
LCD01[8] = ((PV_PowerGeneration & 0x7FFF)/10)+'0'; //�ഫPV�o�q�q
LCD01[9] = ((PV_PowerGeneration & 0x7FFF)%10)+'0';
if ((IBDC_PowerGeneration & 0x8000) > 0) LCD01[10] = '+'; //�M�wIBDC�o�q�q�����t��
else LCD01[10] = '-';
LCD01[11] = ((IBDC_PowerGeneration & 0x7FFF)/10)+'0'; //�ഫIBDC�o�q�q
LCD01[12] = ((IBDC_PowerGeneration & 0x7FFF)%10)+'0';
if ((INV_PowerGeneration & 0x8000) > 0) LCD01[13] = '+'; //�M�wINV�o�q�q�����t��
else LCD01[13] = '-';
LCD01[14] = ((INV_PowerGeneration & 0x7FFF)/10)+'0'; //�ഫINV�o�q�q
LCD01[15] = ((INV_PowerGeneration & 0x7FFF)%10)+'0';
remain_Value = PVINV_ErrCode; //�ഫPVINV�����~�X
LCD02[2] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
LCD02[1] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
LCD02[0] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
//LCD02[0] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
LCD02[3] = ' ';
remain_Value = PVINV_WarningCode; //�ഫPVINV��ĵ�ܽX
LCD02[6] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
LCD02[5] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
LCD02[4] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
//LCD02[4] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
LCD02[7] = ' ';
remain_Value = IBDC_ErrCode; //�ഫIBDC�����~�X
LCD02[10] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
LCD02[9] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
LCD02[8] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
//LCD02[8] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
LCD02[11] = ' ';
remain_Value = IBDC_WarningCode; //�ഫIBDC��ĵ�ܽX
LCD02[14] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
LCD02[13] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
LCD02[12] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
//LCD02[12] = remain_Value%10 + '0'; remain_Value = remain_Value/10;
LCD02[15] = ' ';
LCD_Display(LCD01, LCD02);
}
void UpdateLEDs(void) {//��sLED
int Led_Green_On = 1;
//�����~�X�A�I�G���~���ܿO
if (PVINV_ErrCode || IBDC_ErrCode) {LED_RED_ON; Led_Green_On=0;}
else {LED_RED_OFF;}
if (PVINV_WarningCode || IBDC_WarningCode) {LED_YELLOW_ON; Led_Green_On=0;}
else {LED_YELLOW_OFF;}
if (Led_Green_On) LED_GREEN_ON;
else LED_GREEN_OFF;
}
void init_SI_GUI(void) {//�H���������骺��l�]�w
//��������ܼ�
bScanKeyTrigger = 1; //�Ұʫ��䱽�y
KeyEvent_Shadow = KEYEVENT_NO_EVENT; //�M�ū���ƥ�v�l
KeyEvent = KEYEVENT_NO_EVENT; //�M�ū���ƥ�
nFuntionIndex = _Menu_EntryPoint_Index; //�_�l�ާ@���
menu_state = 1; //����l���A
OpMode = OpMode_StandBy; //�]�w�t�Ϊ��B��Ҧ����ݾ����A
OpModeF = 0; //�M�ŹB��Ҧ��P��X��
ModeSel_Action_F = 0; //�M�żҦ��]�w����X��
PVINV_ErrCode = GUI_ErrCode_NO_ERROR; //�M��PVINV�^�������~�X
IBDC_ErrCode = GUI_ErrCode_NO_ERROR; //�M��IBDC�^�������~�X
PVINV_WarningCode = GUI_WarningCode_NO_Waring; //�M��IBDC�^����ĵ�T�X
IBDC_WarningCode = GUI_WarningCode_NO_Waring; //�M��IBDC�^����ĵ�T�X
PVINV_Report = GUI_Report_NoAvailable; //�M��PVINV�^����T
IBDC_Report = GUI_Report_NoAvailable; //�M��IBDC�^����T
PV_PowerGeneration = 0; //MPPT�o�q�q�]�w��0kW
INV_PowerGeneration = 0; //INV�o�q�q�]�w��0kW
IBDC_PowerGeneration= 0; //IBDC�o�q�q�]�w��0kW
//��ܰ_�l�e��
LCD_Display("TATUNG Smart INV", "-------> PowerOn");
do_ParaSet_Done(); //�o���ѼơA�䤤OpMode_Enable=0��n����B�@
//�B�zLED�����A
LED_RED_OFF; LED_YELLOW_OFF; LED_GREEN_ON;
}
//�Τ��_�Ӷi����䪺���y�u�@
//�`�N�G���ઽ����KeyEvent�A�]������C�����_��sKeyEvent�A��L�t��
// �֪���Ʒ����i��|�A���ܰʥ��A�q�ӨϨ�Ө�ƩΨ�L���L�k�o��
// �s�����쪺KeyEvent�A�Ӱ��X�����T������
// �ҥH�~�|�]�pKeyEvent_Shadow
__interrupt void cpu_timer0_isr(void) {
CpuTimer0.InterruptCount++; //�L�q�A�ȬO���D���_���@��
if (bScanKeyTrigger) {//�O�_�n�i�汽�y����H
KeyEvent_Shadow = ScanKey(); //�i�汽�y����
if (KeyEvent_Shadow != KEYEVENT_NO_EVENT)
bScanKeyTrigger = 0; //������䱽�y�A�������ƥ�Q�B�z����
}
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1; //�A���Ұʤ��_
}
void Menu_EntryPoint(void) {//���i�J�I
if (KeyEvent == KEYEVENT_POWER_ON){
nFuntionIndex = _Menu_ModeParaSel_Index; //�������
menu_state = 1; //��l�ƿ�檬�A
}
}
//LWG�G�������ѼҦ��M�Ѽƪ��]�w�\��
//menu_state = 1(��ܰ���Ҧ��ΰѼƳ]�w�Ҧ��^�B2�]��ܨֺ�Ҧ��^�B3�]��ܥR�q�Ҧ��^�B4�]��ܫݾ��Ҧ��^�B5�]��ܰѼƳ]�w�Ҧ��^
void Menu_ModeParaSel(void) {//�Ҧ��P�Ѽƿ�ܿ��
const Uint32 Max_menu_state = 5; //����榳��ӿﶵ
/* �e�\��
switch (KeyEvent) {//�ھ�Key Event�ӽվ�menu_state
case KEYEVENT_CANCEL:
case KEYEVENT_POWER_OFF: init_SI_GUI(); return;
case KEYEVENT_UP: menu_state--; break;
case KEYEVENT_DOWN: menu_state++; break;
case KEYEVENT_OK: nFuntionIndex = (1 == menu_state)? _Menu_ModeSel_Index:_Menu_ParaSet_Index; //�������
menu_state = 1; return;
default: break;
}
*/
//�������餤��menu_state�N����ܪ��Ҧ�
switch (KeyEvent) {//�ھ�Key Event�ӽվ�menu_state
case KEYEVENT_CANCEL: menu_state = 1; break;
case KEYEVENT_POWER_OFF: init_SI_GUI(); return;
case KEYEVENT_GRID: menu_state = 2; break;
case KEYEVENT_CHARGER: menu_state = 3; break;
case KEYEVENT_STANDBY: menu_state = 4; break;
case KEYEVENT_PARAMETER: menu_state = 5; break;
case KEYEVENT_OK: nFuntionIndex = (5 == menu_state)? _Menu_ParaSet_Index:_Menu_ModeSel_Index; //�������
if (5 == menu_state) menu_state = 1; return;
default: break;
}
//�B�zmenu_state�MKEYEVENT_CLEAR;
if (0 == menu_state) menu_state = Max_menu_state;
if (Max_menu_state < menu_state) menu_state=1;
switch (menu_state) {//��ܰT��
case 1: LCD_Display("Sel Oper/PARA","Press KEY ---> "); break;
case 2: LCD_Display("Do GRID Mode?","Press OK or ESC"); break;
case 3: LCD_Display("Do CHAR Mode?","Press OK or ESC"); break;
case 4: LCD_Display("Do STBY Mode?","Press OK or ESC"); break;
case 5: LCD_Display("Do PaSet Mode?","Press OK or ESC"); break;
default: break;
}
}
//menu_state = 1(��ܰ���Ҧ��ΰѼƳ]�w�Ҧ��^�B2�]��ܨֺ�Ҧ��^�B3�]��ܥR�q�Ҧ��^�B4�]��ܫݾ��Ҧ��^�B5�]��ܰѼƳ]�w�Ҧ��^
void Menu_ModeSel(void) {//�Ҧ���ܿ��:�����w�g��ܦn�F
//���t�X�e�����Ҧ��W�d�A���s�վ�menu_state���ƾ�
switch (menu_state) {//��ܰT��
case 2: menu_state = 1; break; //�ֺ�Ҧ�
case 3: menu_state = 2; break; //�R�q�Ҧ�
case 4: menu_state = 3; break; //�ݾ��Ҧ�
default: break;
}
Menu_ModeSel_Action();
nFuntionIndex = _Menu_ModeParaSel_Index; //�������
menu_state = 1; //��l�ƿ�檬�A
}
/*
void Menu_ModeSel(void) {//�Ҧ���ܿ��
const Uint32 Max_menu_state = 4; //����榳���ӿﶵ
if (OpMode_CheckWarning < menu_state) {//�b�˵�ĵ�ܰT���ɡAmenu_state�|�Q�]�w��Max_menu_state+1�A�H�ϧO��
switch (KeyEvent) {//�ھ�Key Event�ӽվ�menu_state
case KEYEVENT_POWER_OFF: init_SI_GUI(); return;
case KEYEVENT_CANCEL: menu_state = 1; return;
default: return;
}
}
switch (KeyEvent) {//�ھ�Key Event�ӽվ�menu_state
case KEYEVENT_POWER_OFF: init_SI_GUI(); return;
case KEYEVENT_UP: menu_state--; break;
case KEYEVENT_DOWN: menu_state++; break;
case KEYEVENT_OK: Menu_ModeSel_Action(); return; //OpMode = menu_state; do_ModeSet();
case KEYEVENT_CANCEL: menu_state = 1; nFuntionIndex = _Menu_ModeParaSel_Index; return;
default: break;
}
//�B�zmenu_state�MKEYEVENT_CLEAR;
if (0 == menu_state) menu_state = Max_menu_state;
if (Max_menu_state < menu_state) menu_state=1;
switch (menu_state) {//��ܰT���G�˵�ĵ�ܰT���n��b�̫�@�Ӫ��A
case 1: LCD_Display("*Grid Discharger", " Grid Charger"); break;
//case 2: LCD_Display("*Grid Charger", " Standalone"); break;
//case 3: LCD_Display("*Standalone", " Check Warning"); break;
case 2: LCD_Display("*Grid Charger", " StandBy"); break;
case 3: LCD_Display("*StandBy", " Check Warning"); break;
case 4: LCD_Display("*Check Warning", " Grid Discharger");break;
default: break;
}
}
*/
void Menu_ModeSel_Action(void) {//�˵�ĵ�ܰT���άO�]�w�B��Ҧ�..
ModeSel_Action_F = 1;
if (OpMode_CheckWarning == menu_state) {//�n�˵�ĵ�ܰT���ܡH
if (PVINV_WarningCode >= PVINV_WARN_NUMBER-1) PVINV_WarningCode = PVINV_WARN_NUMBER-1;
if (IBDC_WarningCode >= IBDC_WARN_NUMBER-1) IBDC_WarningCode = IBDC_WARN_NUMBER-1;
LCD_Display(PVINV_WarnMsg[PVINV_ErrCode], IBDC_WarnMsg[IBDC_ErrCode]);
menu_state = OpMode_CheckWarning + 1; //�T���u�n��ܤ@���Y�i�A�[1�O���F���n�A�i�J�����
return;
}
//�]�w�B��Ҧ�
OpMode = menu_state;
/* ���Display_Msg�����
switch (menu_state) {//��ܰT��
case 1: LCD_Display("Grid Discharger ", " Waiting"); break; //�ݭn���@�ӹL��
case 2: LCD_Display("Grid Charger ", " Waiting"); break;
case 3: LCD_Display("StandBy ", " RUNNING"); break;
default: break;
}
*/
switch (menu_state) {//��ܰT��
case 1: Display_Msg("W Grid "); break; //�����|�q��q��Ҧ��B��e���e�m�@�~
case 2: Display_Msg("W BatC "); break; //����R�q�q���Ҧ��B��e���e�m�@�~
case 3: Display_Msg("R StandB"); break; //����ݾ��Ҧ����B��
default: break;
}
do_ModeSet();
}
void do_ModeSet() {//����Ҧ��]�w�����᪺�ʧ@
Uint16 counter;
unsigned short Imax_D_temp = Imax_D; //�p�G�OBoost Mode�A���]�wIBDC��X�q�y��0
if (1 == OpMode) Imax_D = 0; //�p�G�OBoost Mode�A�h���]�wIBDC��X�q�y��0
if (3 == OpMode) OpMode = 0; //�]��������Ҧ��A�Q�θӼҦ��A�R��Stand-bye�Ҧ�
OpModeF = 0; do_ParaSet_Done(); //�M�ŹB��Ҧ��P��X�СA���MPPT�MINVBDC�o���B��Ѽ�
for (counter=0; counter < 30; counter++) //����3s
DELAY_US(100000L); //����100ms
OpModeF = 1; mailbox_send(GUI2CAN_MAX); //�sMPPT�MINVBDC�̹B��Ҧ��A�Ұ�
// �����աA�������A���ݥ��}
if (0 != OpMode) {//�D�ݾ��Ҧ��A�h������IBDC�MPVINV���^��)
LED_YELLOW_ON; counter = 0;
while (1) {
DELAY_US(100000L);
if ((1==PVINV_Report)&&(1==IBDC_Report)) {
PVINV_Report = GUI_Report_NoAvailable;
IBDC_Report = GUI_Report_NoAvailable;
break;
}
if (10 == ++counter) {OpModeF = 0; OpMode = 0; break;} //1��L��A������^���A���^Stand-by�Ҧ�
}
Imax_D = Imax_D_temp; do_ParaSet_Done(); //�A�Ǥ@���Ѽ�
if (0 == OpMode) LCD_Display("Try Again or ", "Call Service ");
LED_YELLOW_OFF;
}
//
/* ���Display_Msg�����
if (1 == OpMode) LCD_Display("Grid Discharger ", " RUNNING");
if (2 == OpMode) LCD_Display("Grid Charger ", " RUNNING");
*/
if (1 == OpMode) Display_Msg("R Grid ");
if (2 == OpMode) Display_Msg("R BatC ");
}
void do_ParaSet_Done(void) {//�N�ѼƳz�LCAN Bus�o����MPPT�MInverter+BDC...
Uint16 nMBXnbr;
//change baud rate
setupBaudRate(BaudRate);
for (nMBXnbr=GUI2CAN_MIN; nMBXnbr<= GUI2CAN_MAX; nMBXnbr++) {
mailbox_send(nMBXnbr); //�o���Ѽ�
DELAY_US(400L);
}
}
//***�Ѽƣ�
void Menu_ParaSet(void) {//�ѼƳ]�w���
unsigned short SI_Parameters_Shadow[ModbusAddrMax];
unsigned short index;
unsigned short data;
//const Uint32 Max_menu_state = ModbusAddrMax; //����榳ModbusAddrMax�ӿﶵ
char ParaMsg[ModbusAddrMax][17] = {
//0123456789ABCDEF
{" Imax_O = 14.0 A"},
{" Vmin_B = 42.0 V"},
{" Imax_C = 30.0 A"},
{" Vabsor = 56.0 V"},
{" Tabsor = 2.0 H"},
{" Vfloat = 55.5 V"},
{" Imax_D = 7.5 A"},
{" LVP =100.0 V"},
{" VoutF = 1 "},
{" FoutF = 1 "},
{" ChargeF= 1 "},
{" MD_ID = 1 "},
{" BaudRa = 5 "}
};
//1. �K�X�T�{
if (!Password_Check()) {menu_state = 1; nFuntionIndex = _Menu_ModeParaSel_Index; return;}
bScanKeyTrigger = 1; KeyEvent = KEYEVENT_NO_EVENT;
//2. ��l��SI_Parameters_Shado
for (index=0; index<ModbusAddrMax; index++) SI_Parameters_Shadow[index] = SI_Parameters[index];
//3. �L�a�j��A����]�w�n�άO����
while (1) {
Uint16 menu_second = menu_state;
//a. ��s��ܰT��
if (ModbusAddrMax==menu_state) menu_second = 0;
ParaMsg[menu_state-1][0] = '*'; ParaMsg[menu_second][0] = ' ';
updateDisplayMsg(ParaMsg[menu_state-1], SI_Parameters_Shadow[menu_state-1], menu_state);
updateDisplayMsg(ParaMsg[menu_second], SI_Parameters_Shadow[menu_second], menu_second+1);
LCD_Display(ParaMsg[menu_state-1], ParaMsg[menu_second]);
//b. //���s����ƥ�ܡH��s���A�M��ھ�Key Event�ӽվ�menu_state
if (!bScanKeyTrigger) {KeyEvent = KeyEvent_Shadow; KeyEvent_Shadow = KEYEVENT_NO_EVENT;}
switch (KeyEvent) {
case KEYEVENT_POWER_OFF: init_SI_GUI(); return;
case KEYEVENT_UP: menu_state--; break;
case KEYEVENT_DOWN: menu_state++; break;
case KEYEVENT_CANCEL: menu_state = 1;
nFuntionIndex = _Menu_ModeParaSel_Index; return;
default: break;
}
if (KEYEVENT_OK == KeyEvent) break;
//c. �B�zmenu_state
if (0 == menu_state) menu_state = ModbusAddrMax;
if (ModbusAddrMax < menu_state) menu_state=1;
//d. �̾ګ���ƥ��s���
data = SI_Parameters_Shadow[menu_state-1];
switch (KeyEvent) {
case KEYEVENT_LEFT: data += 1; break;
case KEYEVENT_RIGHT: (data<=1)? data=0:data--; break;
case KEYEVENT_LEFT_LONG: data += 3; break;
case KEYEVENT_RIGHT_LONG: (data <= 3)? data=0:(data -= 3); break;
}
if (KeyEvent != KEYEVENT_NO_EVENT) {bScanKeyTrigger = 1; KeyEvent = KEYEVENT_NO_EVENT;}
//e. �T�{�b�W�U����
if (data > SI_Parameters_MinMax[menu_state-1][1]) data = SI_Parameters_MinMax[menu_state-1][1];
if (data < SI_Parameters_MinMax[menu_state-1][0]) data = SI_Parameters_MinMax[menu_state-1][0];
//f. ��s
SI_Parameters_Shadow[menu_state-1] = data;
}
//��s���ҳ]�w���ѼơA�M��o����MPPT�BInverter+IBDC
for (index=0; index<ModbusAddrMax; index++) SI_Parameters[index] = SI_Parameters_Shadow[index];
do_ParaSet_Done(); menu_state = 1; nFuntionIndex = _Menu_ModeParaSel_Index;
}
//��s��ܰT��
void updateDisplayMsg(char* pmyMsg, unsigned short myData, unsigned short position) {
unsigned short data;
unsigned short curpos;
curpos = 13; data = myData;
*(pmyMsg+curpos) = '0'+ data%10; data = data/10; curpos--;
if (position <= ModbusAddrMax-5) {//��T���ѪR��1�A�e���Ҭ�0.1
*(pmyMsg+curpos)='.'; curpos--;
if (0==data) {*(pmyMsg+curpos) = '0'+ data%10; curpos--;}
}
//if ((0==data)&&(position != ModbusAddrMax)) {*(pmyMsg+curpos) = '0'+ data%10; curpos--;}
for (; curpos>8; curpos--) {
if (0==data) *(pmyMsg+curpos) = ' ';
else {*(pmyMsg+curpos) = '0'+ data%10; data = data/10;}
}
}
//�K�X�T�{�G�����T�^��0�F�Ϥ��^��1
//Uint16 Password = 0x1234; //�K�X
//Uint16 Password_Length = 4; //�K�X����
//�W�� = 0x01�B�U�� = 0x02�B���� = 0x03�B�k�� = 0x04
Uint16 Password_Check(void) {
char PasswordMsg[2][17] = {{"Password Check"}, {"-> "}};
Uint16 myPassword = 0x00;
Uint16 myPassword_Length = 0;
//���}���䰻������
bScanKeyTrigger = 1; KeyEvent = KEYEVENT_NO_EVENT;
while (1) {//��J�K�X
LCD_Display(PasswordMsg[0], PasswordMsg[1]);
if (!bScanKeyTrigger) {KeyEvent = KeyEvent_Shadow; KeyEvent_Shadow = KEYEVENT_NO_EVENT;}
else continue;
switch (KeyEvent) {
case KEYEVENT_POWER_OFF: init_SI_GUI(); return 0;
case KEYEVENT_UP: myPassword = myPassword<<4 | 0x01; myPassword_Length++; break;//<<4
case KEYEVENT_DOWN: myPassword = myPassword<<4 | 0x02; myPassword_Length++; break;
case KEYEVENT_LEFT: myPassword = myPassword<<4 | 0x03; myPassword_Length++; break;
case KEYEVENT_RIGHT: myPassword = myPassword<<4 | 0x04; myPassword_Length++; break;
case KEYEVENT_CANCEL: bScanKeyTrigger = 1; KeyEvent = KEYEVENT_NO_EVENT; return 0;
}
if (KeyEvent == KEYEVENT_OK) {
if ((myPassword_Length==Password_Length) && (myPassword == Password)) {
bScanKeyTrigger = 1; KeyEvent = KEYEVENT_NO_EVENT;
return 1; //�K�X���T
}
//�K�X���~���B�m
LCD_Display(PasswordMsg[0], "Error,Try Again?");//�߰ݭn���n�~����աH
bScanKeyTrigger = 1; KeyEvent = KEYEVENT_NO_EVENT;
while (1) {
if (!bScanKeyTrigger) {
KeyEvent = KeyEvent_Shadow; KeyEvent_Shadow = KEYEVENT_NO_EVENT;
if (KeyEvent == KEYEVENT_OK) {bScanKeyTrigger = 1; KeyEvent = KEYEVENT_NO_EVENT; break;}
if (KeyEvent == KEYEVENT_POWER_OFF) {init_SI_GUI(); return 0;}
if (KeyEvent == KEYEVENT_CANCEL) {bScanKeyTrigger = 1; KeyEvent = KEYEVENT_NO_EVENT; return 0;}
}
bScanKeyTrigger = 1; KeyEvent = KEYEVENT_NO_EVENT;
DELAY_US(400L); //while�j��ӧ֡A�L�k�A�ɱo����䵲�G�A�[�ө���A�T�O��
}
myPassword = 0x00; myPassword_Length = 0; //��J�K�X�k�s
PasswordMsg[1][3] = '\0'; //�M�ŬP��
continue;
}
if (myPassword_Length < 14) {PasswordMsg[1][myPassword_Length+2] = '*'; PasswordMsg[1][myPassword_Length+3] = '\0';}
if (KeyEvent != KEYEVENT_NO_EVENT) {bScanKeyTrigger = 1; KeyEvent = KEYEVENT_NO_EVENT;}
}
}
/*
void do_ParaSet_Done(void) {//�N�ѼƳz�LCAN Bus�o����MPPT�MInverter+BDC...
}
*/
/*org
void do_ModeSet() {//����Ҧ��]�w�����᪺�ʧ@
Uint16 counter;
unsigned short Imax_D_temp = Imax_D; //�p�G�OBoost Mode�A���]�wIBDC��X�q�y��0
if (1 == OpMode) Imax_D = 0; //�p�G�OBoost Mode�A�h���]�wIBDC��X�q�y��0
OpModeF = 0; do_ParaSet_Done(); //�M�ŹB��Ҧ��P��X�СA���MPPT�MINVBDC�o���B��Ѽ�
for (counter=0; counter < 30; counter++) //����3s
DELAY_US(100000L); //����100ms
OpModeF = 1; mailbox_send(GUI2CAN_MAX); //�sMPPT�MINVBDC�̹B��Ҧ��A�Ұ�
if (1 == OpMode) {//�p�G�OBoost Mode�A�h������IBDC�MPVINV���^��)
LED_YELLOW_ON;
while (1) {
DELAY_US(100000L);
if ((1==PVINV_Report)&&(1==IBDC_Report)) {
PVINV_Report = GUI_Report_NoAvailable;
IBDC_Report = GUI_Report_NoAvailable;
break;
}
}
Imax_D = Imax_D_temp; do_ParaSet_Done(); //�A�Ǥ@���Ѽ�
LCD_Display("Grid Discharger ", " RUNNING");
LED_YELLOW_OFF;
}
}
*/
//===========================================================================
// No more.
//===========================================================================
SPI API file
#include "SI_GUI_Spi.h"
#include "DSP2803x_Device.h" // DSP28 Headerfile Include File
#include "DSP2803x_Examples.h" // DSP28 Examples Include File
#include "common.h"
#define EEPROM_CS GpioDataRegs.GPADAT.bit.GPIO19
#define RDSR 0b00000101 // RDSR command
#define WREN 0b00000110 // WREN command
#define WRITE 0b00000010 // WRITE command
#define READ 0b00000011 // READ command
void spi_init(void);
Uint16 spi_xmit(int a);
void setup_EEPROM_SPI(void) {
InitSpiaGpio();
spi_init();
}
void spi_init(void) {
SpiaRegs.SPICCR.all = 0x0007; //Data is ready on rising edge), loopback is off, 8-bit data
SpiaRegs.SPICTL.all = 0x000E; //Normal SPI clocking scheme(Data in latch on rising edge)master, 4-pin option, No interrupt
SpiaRegs.SPIBRR = 0x0077; //BateRate 0.5MHz
SpiaRegs.SPICCR.all = 0x0087; //SPI is ready to transmit or receive the next character.
SpiaRegs.SPIPRI.bit.FREE = 1;
//EEPROM_CS = 1;
}
void read_EEPROM_Status(void) {
//EEPROM_CS = 0;
DELAY_US(1);
spi_xmit(RDSR);
//EEPROM_CS = 1;
DELAY_US(100);
}
Uint16 spi_xmit(int a) {
Uint16 Ret_var = 0;
SpiaRegs.SPITXBUF = (a<<8);
while(SpiaRegs.SPISTS.bit.INT_FLAG == 0);
Ret_var = SpiaRegs.SPIRXBUF<<8;
return Ret_var;
}
void addrwrite_EEPROM(Uint16 address,Uint16 Data) {
int addrH,addrL;
addrH = 0;
addrL = 0;
addrH = (address>>8);
addrL = (address&0x00FF);
//write sequence..
// EEPROM_CS = 0;
DELAY_US(1);
spi_xmit(WREN);
// EEPROM_CS = 1;
DELAY_US(1);
// EEPROM_CS = 0;
DELAY_US(1);
spi_xmit(WRITE);
spi_xmit(addrH);
spi_xmit(addrL);
spi_xmit(Data);
DELAY_US(1);
// EEPROM_CS = 1;
DELAY_US(10);
}
Uint16 addrread_EEPROM(Uint16 address) {
Uint16 Ret_var=0;
int addrH,addrL;
addrH = 0;
addrL = 0;
addrH = (address>>8);
addrL = (address&0x00FF);
// EEPROM_CS = 0;
DELAY_US(1);
spi_xmit(READ);
spi_xmit(addrH);
spi_xmit(addrL);
Ret_var = spi_xmit(0);
DELAY_US(1);
// EEPROM_CS = 1;
DELAY_US(100);
return Ret_var;
}
waveform1
waveform2