Other Parts Discussed in Thread: TMS320F280049
你好:
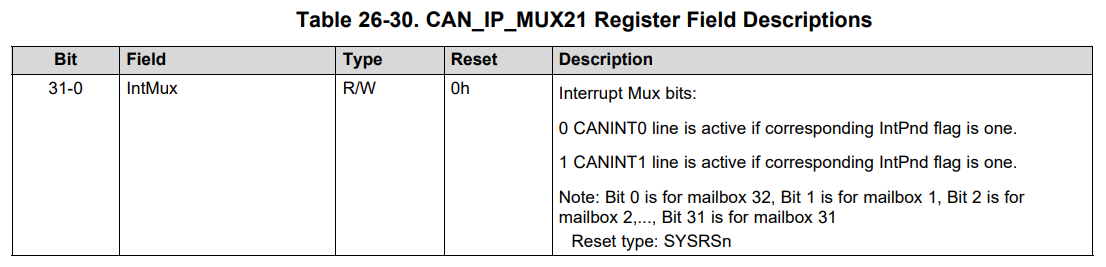
我现在在使用TMS320F280049例程can_ex2_loopback_interrupts测试CAN中断接收。看到例程使用的是CAN_INT_IE0,我想把其修改为CAN_INT_IE1,我做了如下的程序修改:
CAN_enableInterrupt(CANA_BASE, CAN_INT_IE1);
Interrupt_register(INT_CANA1, &canISR);
Interrupt_enable(INT_CANA1);
CAN_enableGlobalInterrupt(CANA_BASE, CAN_GLOBAL_INT_CANINT1);
canISR中断函数中修改CAN_clearGlobalInterruptStatus(CANA_BASE, CAN_GLOBAL_INT_CANINT1);
然后,我进行测试发现接收数据未进入到中断里。请问,我还需要修改哪些地方