

Other Parts Discussed in Thread: TMDSHSECDOCK, TMDSCNCD280025C, TMS320F280025, TMS320F280025C, C2000WARE
Received tmdscncd280025c + tmdshsecdock package On December 9, the outer package is very standard.
TMDSCNCD280025C is a low-cost evaluation and development board for TI C2000™ MCU series of F280025C devices.
TMDSHSECDOCK is a baseboard that provides header pin access to key signals on compatible HSEC180-based controlCARDs. A breadboard area is available for rapid prototyping. Board power can be provided by the provided USB cable or a 5V barrel supply.
The following will introduce the parameter performance of TMS320f280025、TMDSCNCD280025C and TMDSHSECDOCK for reference of performance evaluation and debugging. The part 5 of this document will introduce how to use C2000 CLB to realize PWM output phase shift and protection function.

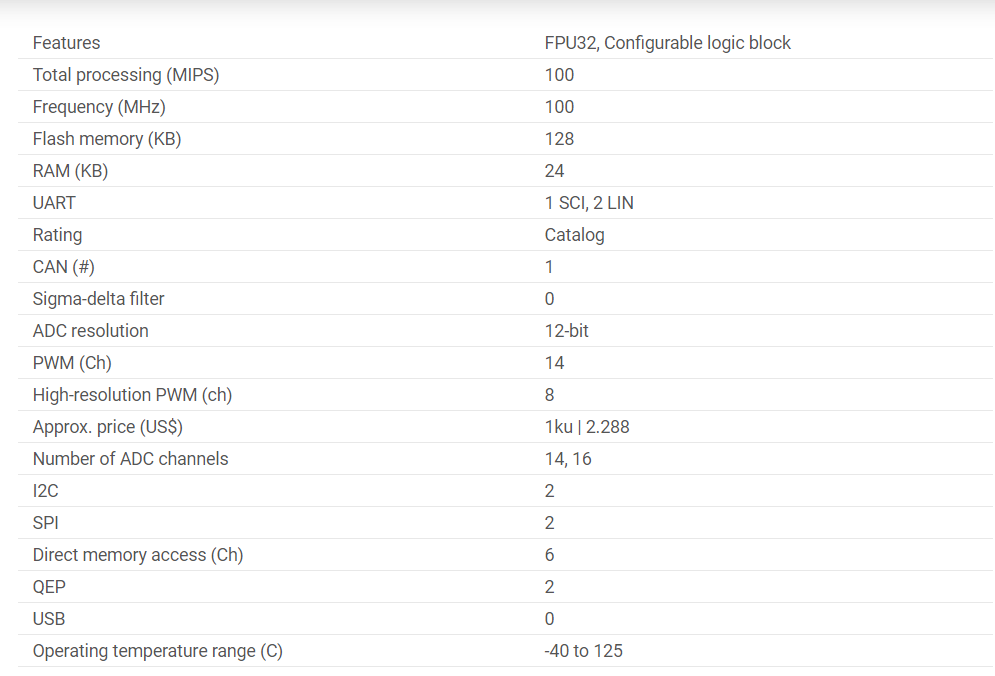
1 TMS320F280025 performance description
Reference technical documentation
- TMS320F28002x Real-Time Microcontrollers
Basic performance Introduction:
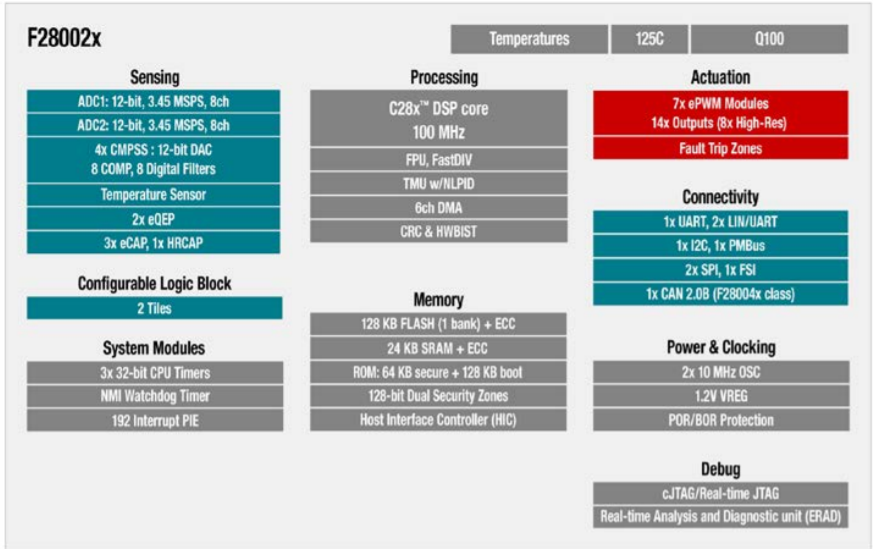
The Functional Block Diagram shows the CPU system and associated peripherals.
Figure 1-1. Functional Block Diagram
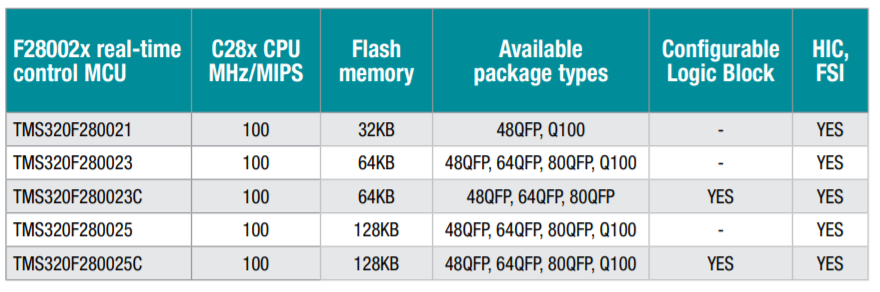
Device Comparison
Package:

- TMS320C28x 32-bit DSP core at 100 MHz
- IEEE 754 Floating-Point Unit (FPU)
- Support for Fast Integer Division (FINTDIV)
- Trigonometric Math Unit (TMU)
- Support for Nonlinear Proportional Integral Derivative (NLPID) control
- CRC Engine and Instructions (VCRC)
- Ten hardware breakpoints (with ERAD)
- On-chip memory
- 128KB (64KW) of flash (ECC-protected)
- 24KB (12KW) of RAM (ECC or parity-protected)
- Dual-zone security
- Clock and system control
- Two internal zero-pin 10-MHz oscillators
- On-chip crystal oscillator or external clock input
- Windowed watchdog timer module
- Missing clock detection circuitry
- Dual-clock Comparator (DCC)
- Single 3.3-V supply
- Internal VREG generation
- Brownout reset (BOR) circuit
- System peripherals
- 6-channel Direct Memory Access (DMA) controller
- 39 individually programmable multiplexed General-Purpose Input/Output (GPIO) pins
- 16 digital inputs on analog pins
- Enhanced Peripheral Interrupt Expansion (ePIE)
- Multiple low-power mode (LPM) support
- Embedded Real-time Analysis and Diagnostic (ERAD)
- Unique Identification (UID) number
- Communications peripherals
- One Power-Management Bus (PMBus) interface
- Two Inter-integrated Circuit (I2C) interfaces
- One Controller Area Network (CAN) bus port
- Two Serial Peripheral Interface (SPI) ports
- One UART-compatible Serial Communication Interface (SCI)
- Two UART-compatible Local Interconnect Network (LIN) interfaces
- Fast Serial Interface (FSI) with one transmitter and one receiver (up to 200Mbps)
- Analog system
- Two 3.45-MSPS, 12-bit Analog-to-Digital Converters (ADCs)
- Up to 16 external channels
- Four integrated Post-Processing Blocks (PPB) per ADC
- Four windowed comparators (CMPSS) with 12-bit reference Digital-to-Analog Converters (DACs)
- Digital glitch filters
- Enhanced control peripherals
- 14 ePWM channels with eight channels that have high-resolution capability (150-ps resolution)
- Integrated dead-band support
- Integrated hardware trip zones (TZs)
- Three Enhanced Capture (eCAP) modules
- High-resolution Capture (HRCAP) available on one of the three eCAP modules
- Two Enhanced Quadrature Encoder Pulse (eQEP) modules with support for CW/CCW operation modes
- Configurable Logic Block (CLB)
- Augments existing peripheral capability
- Supports position manager solutions
- Host Interface Controller (HIC)
- Access to internal memory from an external host
- Background CRC (BGCRC)
- One cycle CRC computation on 32 bits of data
- Diagnostic features
- Memory Power On Self Test (MPOST)
- Hardware Built-in Self Test (HWBIST)
- Package options:
- 80-pin Low-profile Quad Flatpack (LQFP) [PN suffix]
- 64-pin LQFP [PM suffix]
- 48-pin LQFP [PT suffix]
- Temperature options:
- S: –40°C to 125°C junction
- Q: –40°C to 125°C free-air (AEC Q100 qualification for automotive applications)
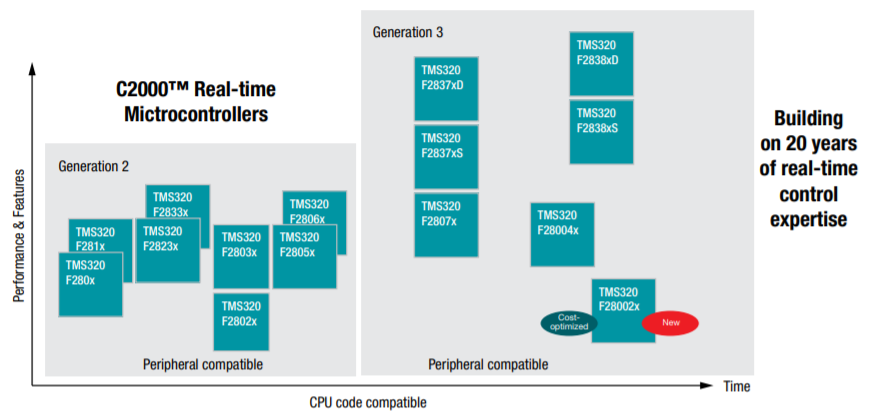
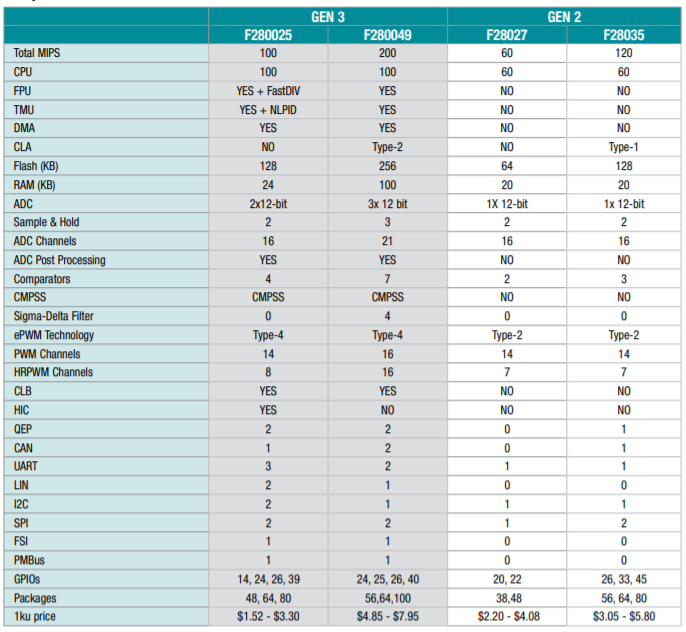
2 Comparison between tms320f280025c and the same type of C2000 series chip:
Comparison of F28002x series with Gen 2 and Gen 3 series
F28002x series:Cost-optimized built for power conversion applications.
3 F280025 controlCARD Information:(TMDSCNCD280025C)
Reference technical documentation :
- F280025 controlCARD Information Guide.
Introduction:

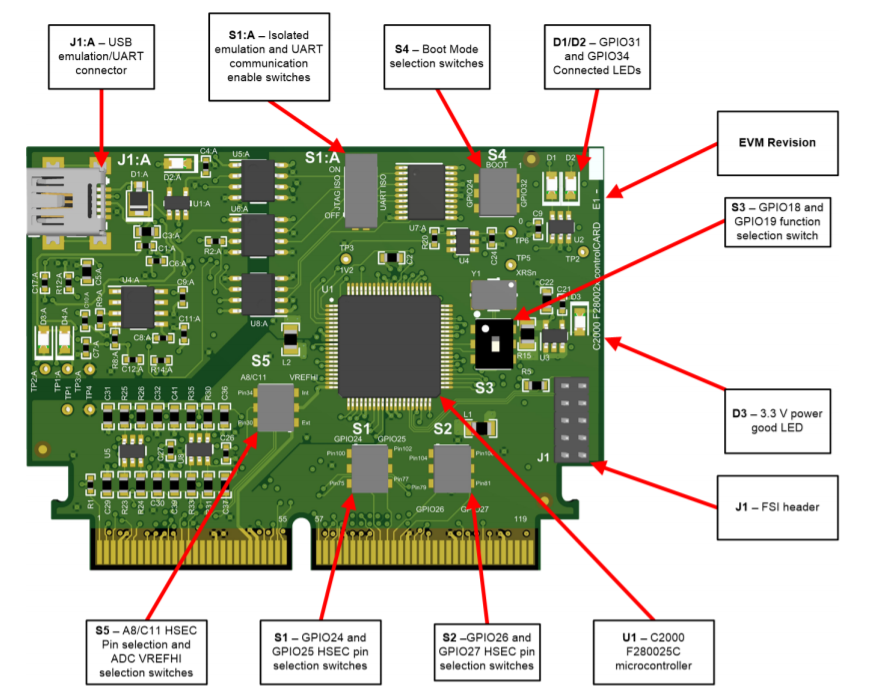
Figure2_1. F280025 controlCARD
Each controlCARD comes with a Hardware Developer’s Kit, which is a full set of files necessary to evaluate and develop with a C2000 device. These files include:
- Schematics – Designed in Altium
- Bill of Materials (BOM)
- Layout PCB files - Designed in Altium
- Gerber files
Notes: This kit is designed to explore the functionality of the F28002x microcontroller. The controlCARD can be treated as a good reference design; it is not intended to be a complete customer design. Full compliance to safety, EMI/EMC, and other regulations are left to the designer of the customer’s system.
Hardware Features
- Isolated on-board XDS100v2 USB-to-JTAG debug probe enables real-time in-system programming and debugging
- Standard 180-pin controlCARD HSEC interface
- Analog I/O, digital I/O and JTAG signals at card interface
- Hardware Files are in C2000Ware at boards\controlCARDs\TMDSCNCD280025C
Software Features
- Free download of Code Composer Studio IDE
- Free download of C2000Ware for device drivers and example projects
- DigitalPower SDK and powerSUITE
- MotorControl SDK
- MathWorks Embedded Target Support
- solidThinking Embed Support
2 180-Pin ControlCARD Docking Station Information(TMDSHSECDOCK )
Reference technical documentation :
- 180-Pin ControlCARD Docking Station Information Guide
- 180_HSEC8_DV_pinout_R1_1.pdf shows GPIO mapping.(The design files are located in C2000ware in the C:\ti\c2000\C2000Ware_1_00_04_00\boards\ExperimenterKits\DockingStation_ HSEC_120or180pin\R4_1 directory. )
Introduction
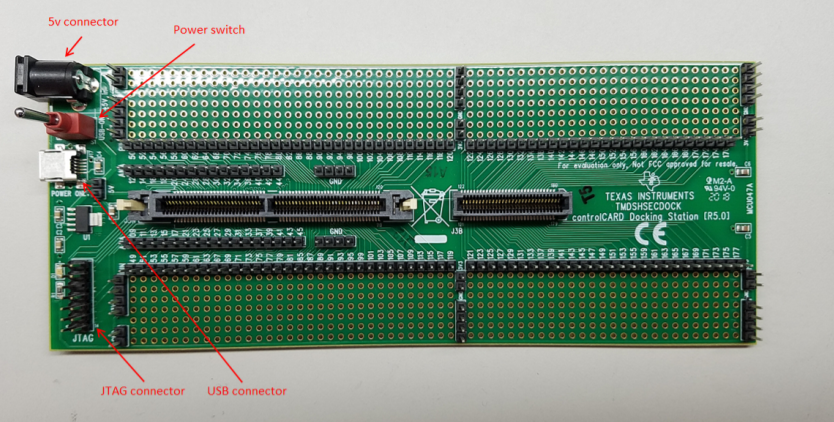
Figure 3_1. 180-Pin controlCARD Docking Station

2 Using C2000 CLB to realize PWM output phase shift and protection function (TMDSCNCD280025C +TMDSHSECDOCK )
Reference technical documentation :
- TMS320F28002x Real-Time Microcontrollers Technical Reference Manual
- C2000WARE_INSTALL_LOCATION\utilities\clb_tool\clb_syscfg\doc
Compiling environment of C2000 Real-time MCUs
- Code Composer Studio (CCS) Integrated Development Environment (IDE)(https://www.ti.com/tool/download/CCSTUDIO)
In order to simulate the CLB design the following additional external (non-TI) tools must be installed:
• A GNU compiler (TDM-GCC)(https://sourceforge.net/projects/tdm-gcc/files/TDMGCC%20Installer/tdm64-gcc-5.1.0-2.exe/download.)
• A simulation viewer (GTK Wave)(https://sourceforge.net/projects/gtkwave/files/)
Firmware:
#include "driverlib.h"
#include "device.h"
#include "clb_config.h"
#include "clb.h"
#include "inc/hw_epwm.h"
#define EPWM1_TIMER_TBPRD 1500U
#define EPWM1_CMPA 50U
#define EPWM1_CMPB 50U
#define EPWM2_TIMER_TBPRD 1500U
#define EPWM2_CMPA 50U
#define EPWM2_CMPB 50U
void initEPWM1(void);
void initEPWM2(void);
__interrupt void epwm1ISR(void);
uint16_t g_u16_Fault_Protection = 0;
uint32_t mode = 0;
void main(void)
{
Device_init();
Device_initGPIO();
Interrupt_initModule();
Interrupt_initVectorTable();
Interrupt_register(INT_EPWM1, &epwm1ISR);
GPIO_setPadConfig(0, GPIO_PIN_TYPE_STD);
GPIO_setPinConfig(GPIO_0_EPWM1A);
GPIO_setPadConfig(1, GPIO_PIN_TYPE_STD);
GPIO_setPinConfig(GPIO_1_EPWM1B);
GPIO_setPadConfig(2, GPIO_PIN_TYPE_STD);
GPIO_setPinConfig(GPIO_2_EPWM2A);
GPIO_setPadConfig(3, GPIO_PIN_TYPE_STD);
GPIO_setPinConfig(GPIO_3_EPWM2B);
SysCtl_disablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC);
initEPWM1();
initEPWM2();
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CLB1);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CLB2);
// initialize all CLB tiles
CLB_enableCLB(CLB1_BASE);
CLB_enableCLB(CLB2_BASE);
initTILE1(CLB1_BASE);
initTILE2(CLB2_BASE);
// CLB tile 1 configuration
CLB_configLocalInputMux(CLB1_BASE, CLB_IN0, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB1_BASE, CLB_IN1, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB1_BASE, CLB_IN2, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB1_BASE, CLB_IN3, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB1_BASE, CLB_IN4, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB1_BASE, CLB_IN5, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB1_BASE, CLB_IN6, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB1_BASE, CLB_IN7, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configGlobalInputMux(CLB1_BASE, CLB_IN0, CLB_GLOBAL_IN_MUX_EPWM1A);
CLB_configGlobalInputMux(CLB1_BASE, CLB_IN1, CLB_GLOBAL_IN_MUX_EPWM1A);
CLB_configGlobalInputMux(CLB1_BASE, CLB_IN2, CLB_GLOBAL_IN_MUX_EPWM1B);
CLB_configGlobalInputMux(CLB1_BASE, CLB_IN3, CLB_GLOBAL_IN_MUX_EPWM1B);
CLB_configGlobalInputMux(CLB1_BASE, CLB_IN4, CLB_GLOBAL_IN_MUX_EPWM1_CTRDIR);
CLB_configGlobalInputMux(CLB1_BASE, CLB_IN5, CLB_GLOBAL_IN_MUX_EPWM1_CTRDIR);
CLB_configGlobalInputMux(CLB1_BASE, CLB_IN6, CLB_GLOBAL_IN_MUX_EPWM1_CTRDIR);
CLB_configGlobalInputMux(CLB1_BASE, CLB_IN7, CLB_GLOBAL_IN_MUX_EPWM1_CTRDIR);
CLB_configGPInputMux(CLB1_BASE, CLB_IN0, CLB_GP_IN_MUX_EXTERNAL);
CLB_configGPInputMux(CLB1_BASE, CLB_IN1, CLB_GP_IN_MUX_EXTERNAL);
CLB_configGPInputMux(CLB1_BASE, CLB_IN2, CLB_GP_IN_MUX_EXTERNAL);
CLB_configGPInputMux(CLB1_BASE, CLB_IN3, CLB_GP_IN_MUX_EXTERNAL);
CLB_configGPInputMux(CLB1_BASE, CLB_IN4, CLB_GP_IN_MUX_GP_REG);
CLB_configGPInputMux(CLB1_BASE, CLB_IN5, CLB_GP_IN_MUX_GP_REG);
CLB_configGPInputMux(CLB1_BASE, CLB_IN6, CLB_GP_IN_MUX_GP_REG);
CLB_configGPInputMux(CLB1_BASE, CLB_IN7, CLB_GP_IN_MUX_GP_REG);
//CLB_selectInputFilter(CLB1_BASE, CLB_IN0, CLB_FILTER_FALLING_EDGE);
// CLB_selectInputFilter(CLB1_BASE, CLB_IN2, CLB_FILTER_FALLING_EDGE);
CLB_selectInputFilter(CLB1_BASE, CLB_IN0, CLB_FILTER_RISING_EDGE);
CLB_selectInputFilter(CLB1_BASE, CLB_IN2, CLB_FILTER_FALLING_EDGE);
// CLB tile 2 configuration
CLB_configLocalInputMux(CLB2_BASE, CLB_IN0, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB2_BASE, CLB_IN1, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB2_BASE, CLB_IN2, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB2_BASE, CLB_IN3, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB2_BASE, CLB_IN4, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB2_BASE, CLB_IN5, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB2_BASE, CLB_IN6, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configLocalInputMux(CLB2_BASE, CLB_IN7, CLB_LOCAL_IN_MUX_GLOBAL_IN);
CLB_configGlobalInputMux(CLB2_BASE, CLB_IN0, CLB_GLOBAL_IN_MUX_EPWM2A);
CLB_configGlobalInputMux(CLB2_BASE, CLB_IN1, CLB_GLOBAL_IN_MUX_EPWM2A);
CLB_configGlobalInputMux(CLB2_BASE, CLB_IN2, CLB_GLOBAL_IN_MUX_EPWM2B);
CLB_configGlobalInputMux(CLB2_BASE, CLB_IN3, CLB_GLOBAL_IN_MUX_EPWM2B);
CLB_configGlobalInputMux(CLB2_BASE, CLB_IN4, CLB_GLOBAL_IN_MUX_EPWM2_CTRDIR);
CLB_configGlobalInputMux(CLB2_BASE, CLB_IN5, CLB_GLOBAL_IN_MUX_EPWM2_CTRDIR);
CLB_configGlobalInputMux(CLB2_BASE, CLB_IN6, CLB_GLOBAL_IN_MUX_EPWM2_CTRDIR);
CLB_configGlobalInputMux(CLB2_BASE, CLB_IN7, CLB_GLOBAL_IN_MUX_EPWM2_CTRDIR);
CLB_configGPInputMux(CLB2_BASE, CLB_IN0, CLB_GP_IN_MUX_EXTERNAL);
CLB_configGPInputMux(CLB2_BASE, CLB_IN1, CLB_GP_IN_MUX_EXTERNAL);
CLB_configGPInputMux(CLB2_BASE, CLB_IN2, CLB_GP_IN_MUX_EXTERNAL);
CLB_configGPInputMux(CLB2_BASE, CLB_IN3, CLB_GP_IN_MUX_EXTERNAL);
CLB_configGPInputMux(CLB2_BASE, CLB_IN4, CLB_GP_IN_MUX_GP_REG);
CLB_configGPInputMux(CLB2_BASE, CLB_IN5, CLB_GP_IN_MUX_GP_REG);
CLB_configGPInputMux(CLB2_BASE, CLB_IN6, CLB_GP_IN_MUX_GP_REG);
CLB_configGPInputMux(CLB2_BASE, CLB_IN7, CLB_GP_IN_MUX_GP_REG);
// CLB_selectInputFilter(CLB2_BASE, CLB_IN0, CLB_FILTER_FALLING_EDGE);
// CLB_selectInputFilter(CLB2_BASE, CLB_IN2, CLB_FILTER_FALLING_EDGE);
CLB_selectInputFilter(CLB2_BASE, CLB_IN0, CLB_FILTER_RISING_EDGE);
CLB_selectInputFilter(CLB2_BASE, CLB_IN2, CLB_FILTER_FALLING_EDGE);
// start PWMs
EPWM_setTimeBaseCounterMode(EPWM1_BASE, EPWM_COUNTER_MODE_UP_DOWN);
EPWM_setTimeBaseCounterMode(EPWM2_BASE, EPWM_COUNTER_MODE_UP_DOWN);
Interrupt_enable(INT_EPWM1);
EINT;
while(1)
{
asm(" NOP");
if (g_u16_Fault_Protection== 1)
{
EPWM_setActionQualifierContSWForceAction(EPWM1_BASE, EPWM_AQ_OUTPUT_A,EPWM_AQ_SW_OUTPUT_LOW);
EPWM_setActionQualifierContSWForceAction(EPWM1_BASE,EPWM_AQ_OUTPUT_B,EPWM_AQ_SW_OUTPUT_LOW);
EPWM_setActionQualifierContSWForceAction(EPWM2_BASE, EPWM_AQ_OUTPUT_A,EPWM_AQ_SW_OUTPUT_LOW);
EPWM_setActionQualifierContSWForceAction(EPWM2_BASE,EPWM_AQ_OUTPUT_B,EPWM_AQ_SW_OUTPUT_LOW);
}
else
{
EPWM_setActionQualifierContSWForceAction(EPWM1_BASE, EPWM_AQ_OUTPUT_A,EPWM_AQ_SW_DISABLED);
EPWM_setActionQualifierContSWForceAction(EPWM1_BASE,EPWM_AQ_OUTPUT_B,EPWM_AQ_SW_DISABLED);
EPWM_setActionQualifierContSWForceAction(EPWM2_BASE, EPWM_AQ_OUTPUT_A,EPWM_AQ_SW_DISABLED);
EPWM_setActionQualifierContSWForceAction(EPWM2_BASE,EPWM_AQ_OUTPUT_B,EPWM_AQ_SW_DISABLED);
}
}
}
void initEPWM1()
{
EPWM_setTimeBasePeriod(EPWM1_BASE, EPWM1_TIMER_TBPRD);
EPWM_setPhaseShift(EPWM1_BASE, 0U);
EPWM_setTimeBaseCounter(EPWM1_BASE, 0U);
EPWM_enableSyncOutPulseSource(EPWM1_BASE, EPWM_SYNC_OUT_PULSE_ON_CNTR_ZERO);
EPWM_setCounterCompareValue(EPWM1_BASE, EPWM_COUNTER_COMPARE_A, EPWM1_CMPA);
EPWM_setCounterCompareValue(EPWM1_BASE, EPWM_COUNTER_COMPARE_B, EPWM1_CMPB);
EPWM_disablePhaseShiftLoad(EPWM1_BASE);
EPWM_setClockPrescaler(EPWM1_BASE, EPWM_CLOCK_DIVIDER_1, EPWM_HSCLOCK_DIVIDER_1);
EPWM_setCounterCompareShadowLoadMode(EPWM1_BASE, EPWM_COUNTER_COMPARE_A, EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setCounterCompareShadowLoadMode(EPWM1_BASE, EPWM_COUNTER_COMPARE_B, EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setActionQualifierAction(EPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
EPWM_setActionQualifierAction(EPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPB);
EPWM_setActionQualifierAction(EPWM1_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
EPWM_setActionQualifierAction(EPWM1_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPB);
EPWM_setInterruptSource(EPWM1_BASE, EPWM_INT_TBCTR_ZERO);
EPWM_enableInterrupt(EPWM1_BASE);
EPWM_setInterruptEventCount(EPWM1_BASE, 3U);
}
void initEPWM2()
{
EPWM_setTimeBasePeriod(EPWM2_BASE, EPWM2_TIMER_TBPRD);
EPWM_setPhaseShift(EPWM2_BASE, 0U);
EPWM_setTimeBaseCounter(EPWM2_BASE, 0U);
EPWM_enablePhaseShiftLoad(EPWM2_BASE);
EPWM_setPhaseShift(EPWM2_BASE, 0U);
EPWM_setCounterCompareValue(EPWM2_BASE, EPWM_COUNTER_COMPARE_A, EPWM2_CMPA);
EPWM_setCounterCompareValue(EPWM2_BASE, EPWM_COUNTER_COMPARE_B, EPWM2_CMPB);
EPWM_setClockPrescaler(EPWM2_BASE, EPWM_CLOCK_DIVIDER_1, EPWM_HSCLOCK_DIVIDER_1);
EPWM_setCounterCompareShadowLoadMode(EPWM2_BASE, EPWM_COUNTER_COMPARE_A, EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setCounterCompareShadowLoadMode(EPWM2_BASE, EPWM_COUNTER_COMPARE_B, EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setActionQualifierAction(EPWM2_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
EPWM_setActionQualifierAction(EPWM2_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPB);
EPWM_setActionQualifierAction(EPWM2_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
EPWM_setActionQualifierAction(EPWM2_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPB);
}
__interrupt void epwm1ISR(void)
{
EPWM_clearEventTriggerInterruptFlag(EPWM1_BASE);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP3);
if (mode == 0)
{
CLB_setOutputMask(CLB1_BASE, 0x5, false);
CLB_setOutputMask(CLB1_BASE, 0x4, false);
CLB_setOutputMask(CLB2_BASE, 0x5, false);
CLB_setOutputMask(CLB2_BASE, 0x4, false);
}
else
{
CLB_setOutputMask(CLB1_BASE, 0x5, true);
CLB_setOutputMask(CLB1_BASE, 0x4, true);
CLB_setOutputMask(CLB2_BASE, 0x5, true);
CLB_setOutputMask(CLB2_BASE, 0x4, true);
}
asm(" NOP");
}
/* end of file */
Logic of CLB:
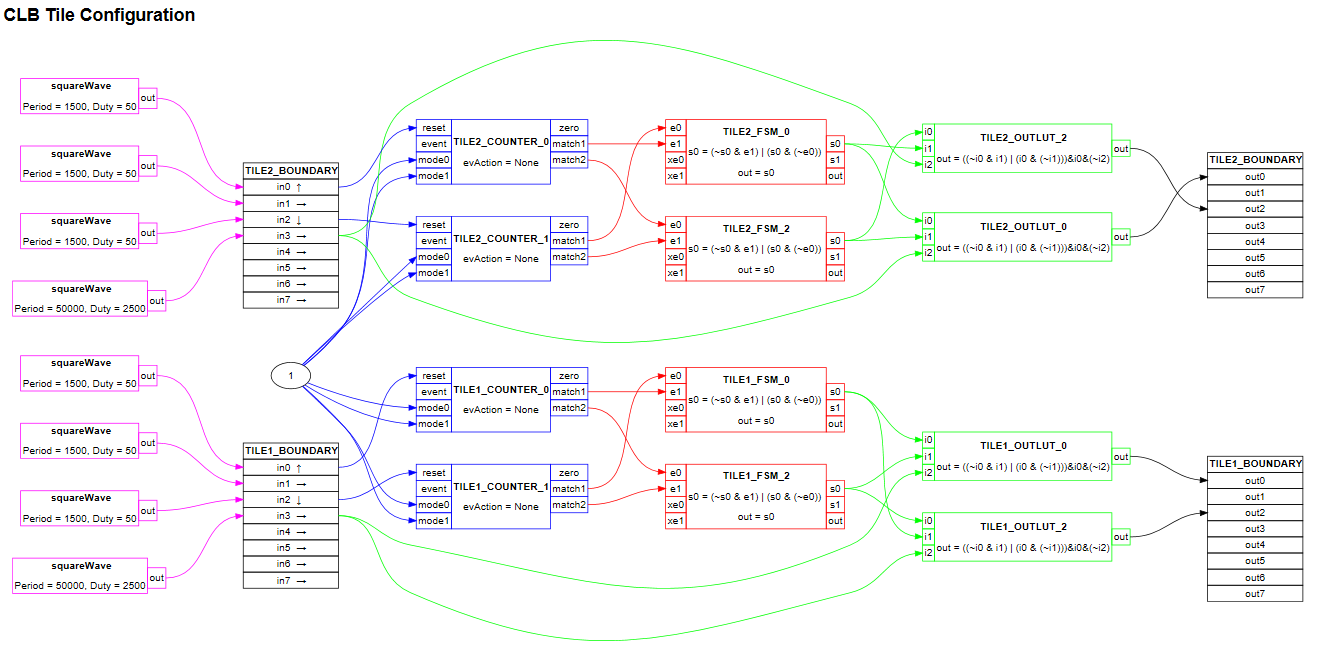
PWM frequency:66.7Khz
PWM duty:0.0333
Dead time:0.2us
Phase shift angle:165°
The simulation results are as follows:

