我使用的例程是controlSUITE\device_support\F2837xS\v210\F2837xS_examples_Cpu1\can_loopback\cpu01\ccs
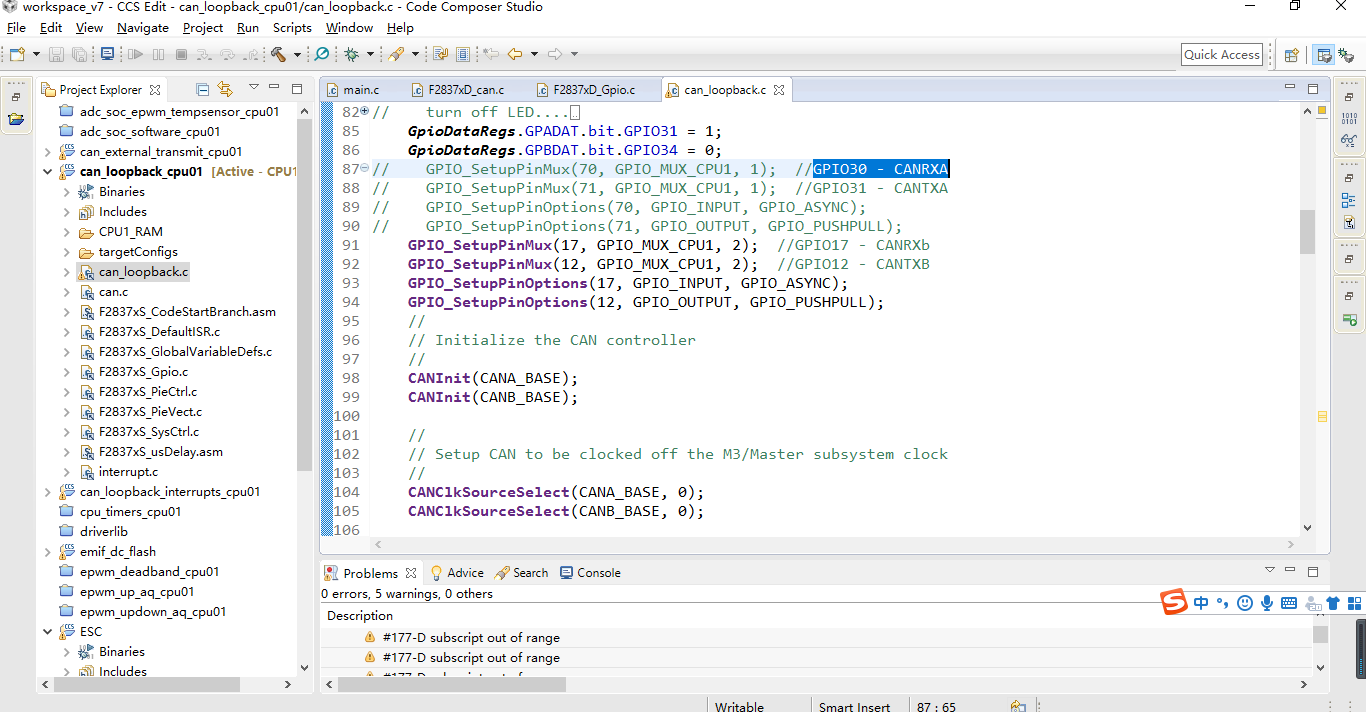
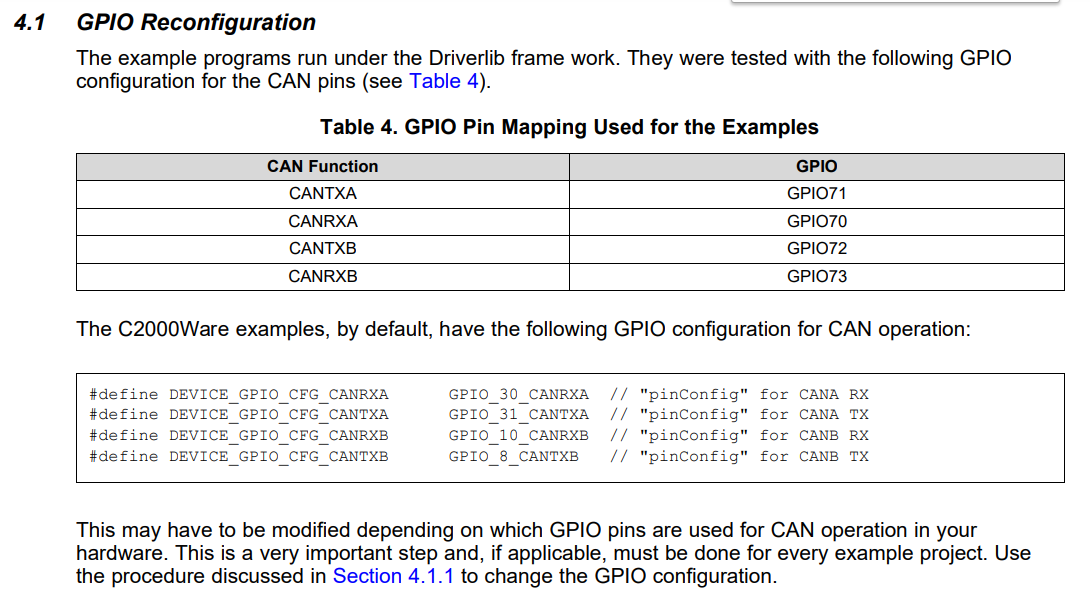
GPIO70 - CANRXA,GPIO71 - CANTXA
下载28377S板子(这个板子是自己设计开发,已经验证电路正常)后can无法通讯,
同一个例程,GPIO17 - CANRXA,GPIO12 - CANTXA,下载到28379DLaunchPad,可以通讯
是不是这个例程用70,71引脚不兼容,还有其他适用于28377S的CAN例程吗,引脚已经不能修改了。
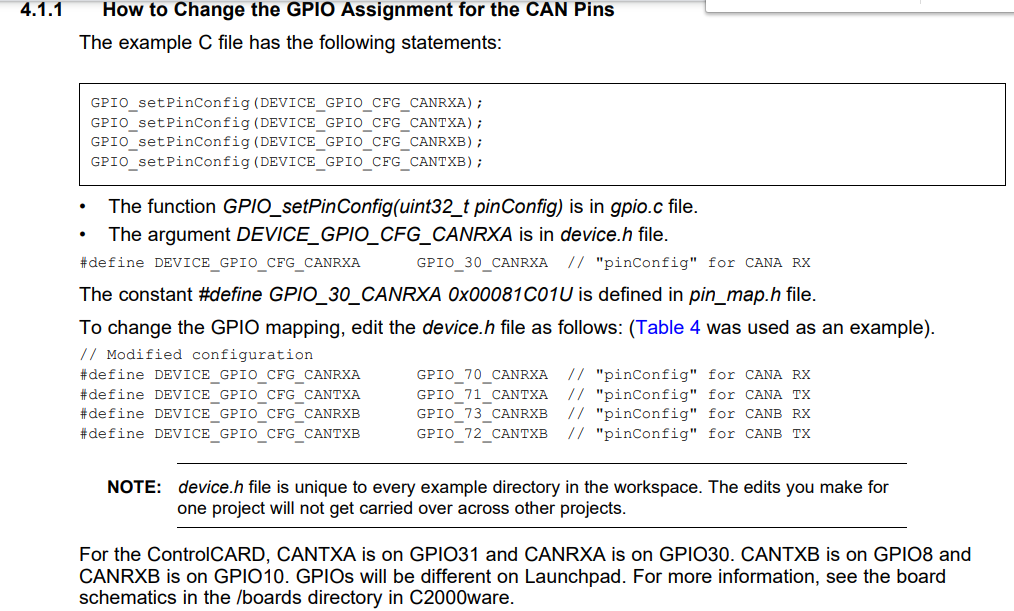
还有其他地方需要修改吗,如图就是我修改的地方