請問一下 CAN_getInterruptCause() 跟 CAN_getInterruptMessageSource()
兩者有甚麼差別??
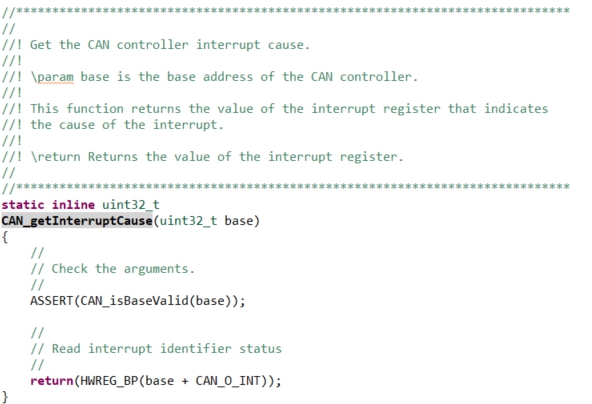
CAN_getInterruptCause() 是說可以知道CAN中斷的原因,甚麼原因?
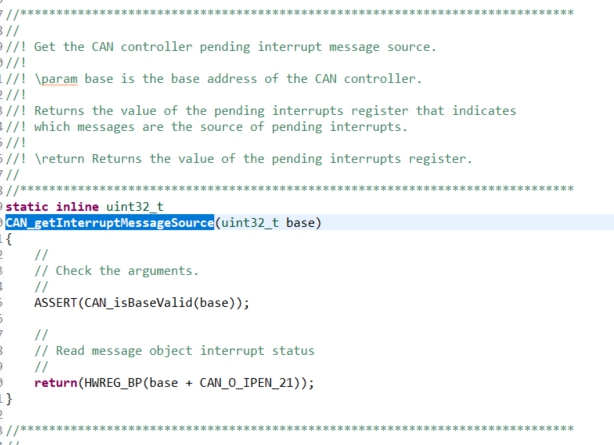
getInterruptMessageSource() 是說可以知道CAN中斷 interrupt message source.,message source是指CAN_L receive 的 訊息嗎?
請問一下 CAN_getInterruptCause() 跟 CAN_getInterruptMessageSource()
兩者有甚麼差別??
CAN_getInterruptCause() 是說可以知道CAN中斷的原因,甚麼原因?
getInterruptMessageSource() 是說可以知道CAN中斷 interrupt message source.,message source是指CAN_L receive 的 訊息嗎?