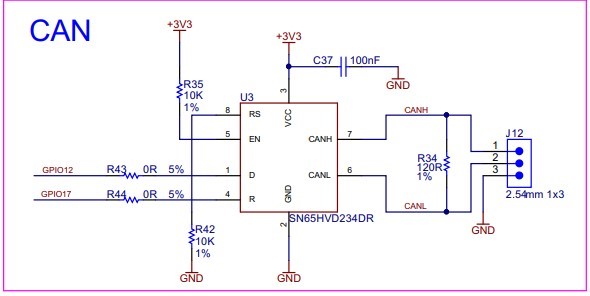
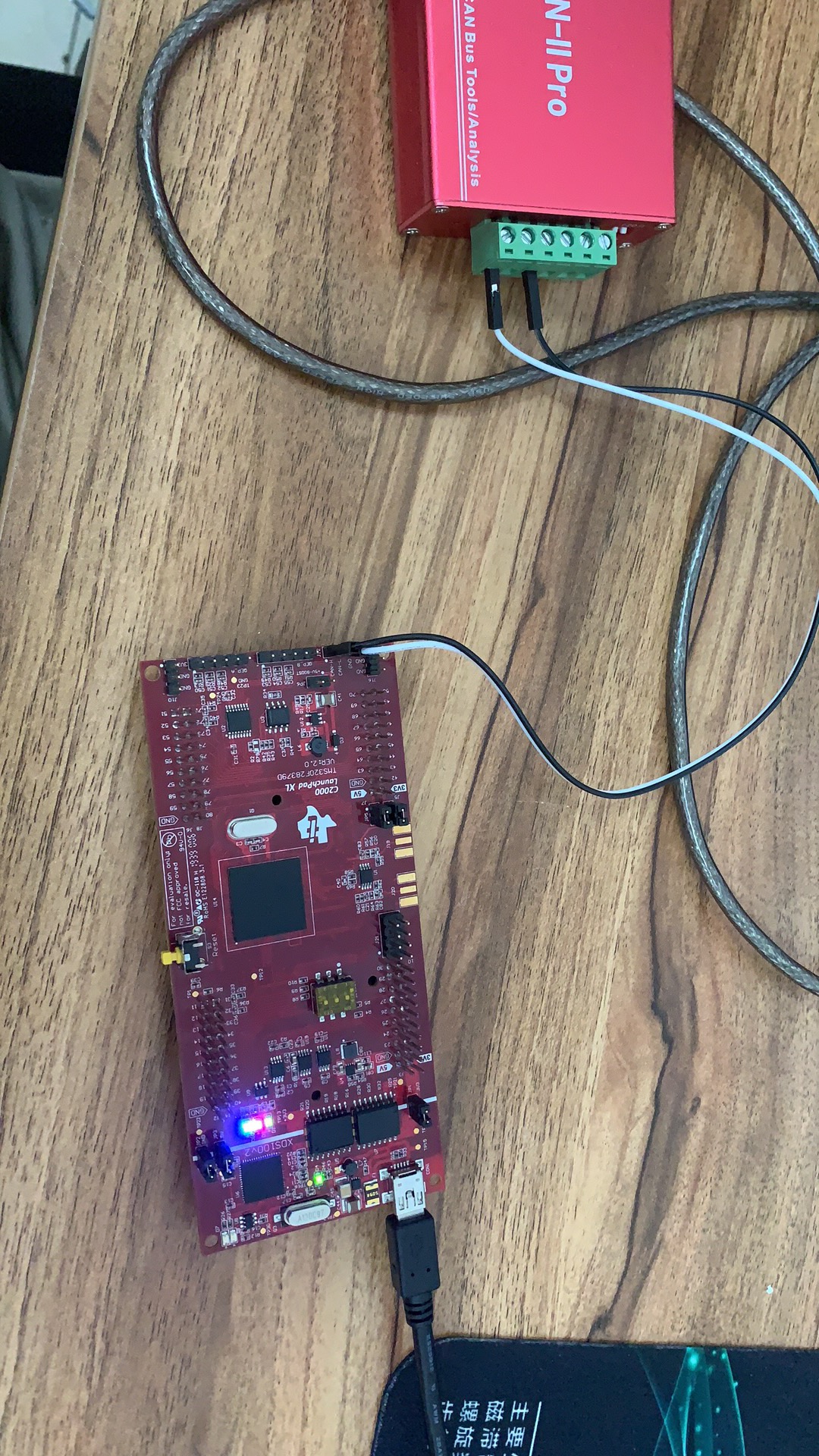
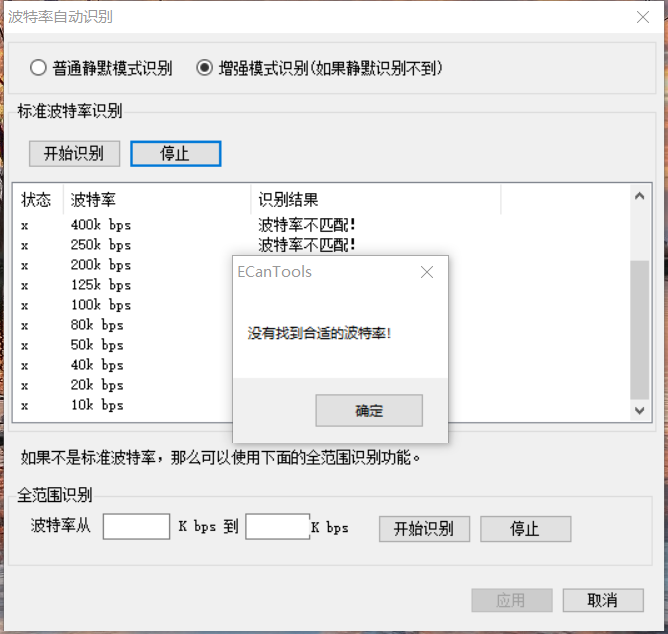
使用can_ex4_simple_transmit例程,仅仅改了引脚,接线正确,无法识别波特率,can总线一直不通是什么原因?
 下面是程序:
下面是程序:
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
//
// Defines
//
#define TXCOUNT 100000
#define MSG_DATA_LENGTH 8
#define TX_MSG_OBJ_ID 1
//
// Globals
//
volatile unsigned long i;
volatile uint32_t txMsgCount = 0;
uint16_t txMsgData[8];
//
// Main
//
void main(void)
{
//
// Initialize device clock and peripherals
//
Device_init();
//
// Initialize GPIO and configure GPIO pins for CANTX/CANRX
// on module A
//
Device_initGPIO();
GPIO_setPinConfig(DEVICE_GPIO_CFG_CANRXB);
GPIO_setPinConfig(DEVICE_GPIO_CFG_CANTXB);
//
// Initialize the CAN controllers
//
CAN_initModule(CANB_BASE);
//
// Set up the CAN bus bit rate to 500kHz for each module
// Refer to the Driver Library User Guide for information on how to set
// tighter timing control. Additionally, consult the device data sheet
// for more information about the CAN module clocking.
//
CAN_setBitRate(CANB_BASE, DEVICE_SYSCLK_FREQ, 500000, 16);
//
// Initialize the transmit message object used for sending CAN messages.
// Message Object Parameters:
// CAN Module: A
// Message Object ID Number: 1
// Message Identifier: 0x95555555
// Message Frame: Extended
// Message Type: Transmit
// Message ID Mask: 0x0
// Message Object Flags: None
// Message Data Length: 4 Bytes
//
CAN_setupMessageObject(CANB_BASE, TX_MSG_OBJ_ID, 0x00000000,
CAN_MSG_FRAME_EXT, CAN_MSG_OBJ_TYPE_TX, 0,
CAN_MSG_OBJ_NO_FLAGS, MSG_DATA_LENGTH);
//
// Initialize the transmit message object data buffer to be sent
//
txMsgData[0] = 0x01;
txMsgData[1] = 0x23;
txMsgData[2] = 0x45;
txMsgData[3] = 0x67;
txMsgData[4] = 0x89;
txMsgData[5] = 0xAB;
txMsgData[6] = 0xCD;
txMsgData[7] = 0xEF;
//
// Start CAN module A operations
//
CAN_startModule(CANB_BASE);
//
// Transmit messages from CAN-A
//
while(1)
//
// Comment for infinite transmissions
//
//for(i = 0; i < TXCOUNT; i++)
//
{
CAN_sendMessage(CANB_BASE, TX_MSG_OBJ_ID, MSG_DATA_LENGTH, txMsgData);
//
// Poll TxOk bit in CAN_ES register to check completion of transmission
//
//while(((HWREGH(CANB_BASE + CAN_O_ES) & CAN_ES_TXOK)) != CAN_ES_TXOK)
{
}
DEVICE_DELAY_US(100000);
}
//
// Stop application
//
asm("ESTOP0");
}
//
// End of File
//